Labor-saving walking aid without external power input
A technology of power input and walking aids, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as unstable power assist systems, no energy locking devices, and difficult control, so as to improve stability and controllability, The effect of enhancing portability and practicality and improving flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
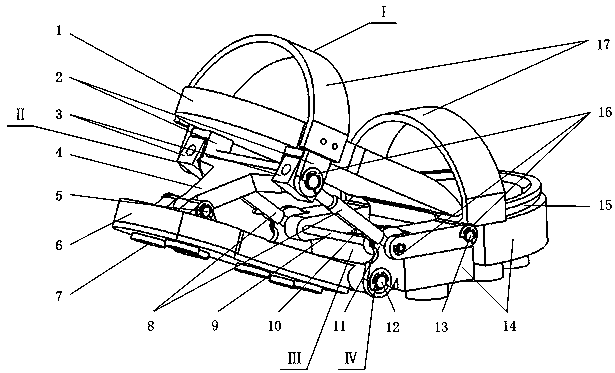
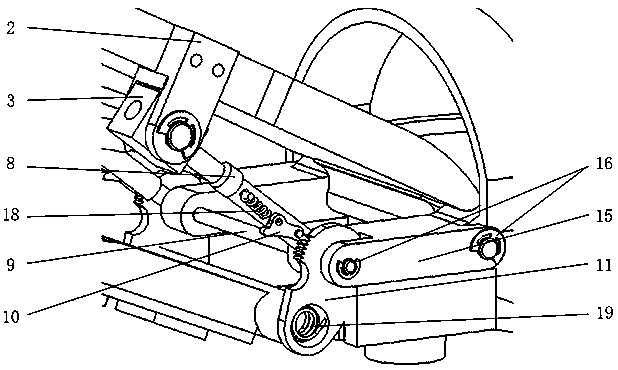
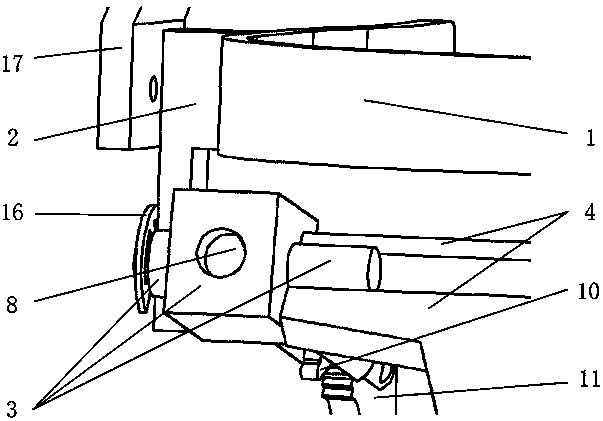
[0024] see figure 1 and figure 2 , the labor-saving walking aid without external power input, comprising a walking aid body (I), a connecting kit (II), a ratchet mechanism (III) and an energy storage torsion spring (IV), characterized in that: the walking aid The front part of the shoe body (15), the rear part of the shoe body (1), and the rear bottom of the shoe body (6) in the main body (I) are concentrically connected through the corresponding connecting shafts; Shaft (5), central shaft (9), ratchet shaft (12), and front shaft (13) are concentrically connected to each component in the walker body (I); the anti-reverse ratchet in the ratchet mechanism (III) The claw (10) is engaged with the special-shaped ratchet (11) in different travel states, and is stopped by the control device; the torsion spring (19) in the energy storage torsion spring (IV) is fixedly installed on the circumferential position of the ratchet shaft (12) , so as to store the kinetic energy when the an...
Embodiment 2
[0026] This embodiment is basically the same as Embodiment 1, and the special features are as follows:
[0027] The walking aid body (I) includes the front part of the shoe body (15), the rear part of the shoe body (1), the shoe buckle (17), the rear bottom of the shoe body (6) and the buffer rubber pad (7, 14), wherein The front part of the shoe body (15) is connected to the rear part of the shoe body (1) in a hinged manner through the front axle (13) installed on it, and the shoe buckle (17) is connected to the rear part of the shoe body (1) through the fixing block (2) connection, the buffer rubber pads (7, 14) are respectively adhered to the back sole (6) of the shoe body (6) and the front part of the shoe body (15) by means of gluing; the walking aid body (I) adopts an aluminum base unless otherwise specified. It can guarantee to bear the weight of the human body, and the variable rubber of the buffer pad and the sponge insole of the insole can make the user comfortable t...
Embodiment 3
[0032] Such as figure 1 , 2 As shown, this labor-saving walker without external power input includes a walker body I, a connection kit II, a ratchet mechanism III, and an energy storage torsion spring IV. It is characterized in that: the walker body (I) includes a shoe Body front part (15), shoe body rear part (1), shoe buckle (17), shoe body rear bottom (6) and buffer rubber pad (7, 14), wherein the shoe body front part (15) is installed on its The upper front axle (13) is connected to the rear part of the shoe body (1) in a hinged manner, the shoe buckle (17) is connected to the rear part of the shoe body (1) through the fixing block (2), and the cushion rubber pads (7, 14) pass through The cementing method is respectively adhered to the rear bottom of the shoe body (6) and the front part of the shoe body (15).
[0033] The connection kit (II) includes a fixed block (2), a sleeve (3), a T-shaped connecting rod (4), a rear axle (5), a middle axle (9), a ratchet axle (12), a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com