Method for dynamically spanning protruding obstacle for four-foot robot
A quadruped robot and robot technology, applied in the direction of motor vehicles, manipulators, program-controlled manipulators, etc., can solve the problems of lack of local foot autonomous planning research, robot movement obstruction, low efficiency, etc., to achieve dynamic self-adaptation, swing The trajectory is stable and reliable, and the effect of improving stability and compliance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in detail below with reference to the accompanying drawings and examples.
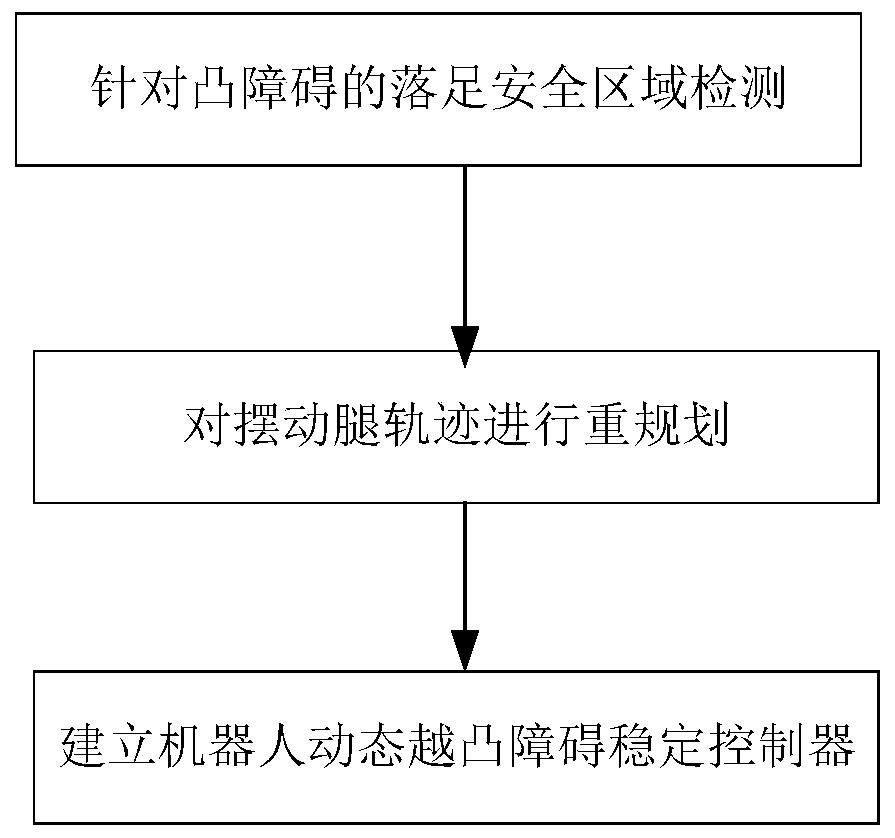
[0030] The invention provides a method for a quadruped robot to dynamically cross convex obstacles. The steps implemented by the method are as follows: figure 1 Shown:
[0031] Step 1: Detection of the robot landing in the safe area. Specifically include:
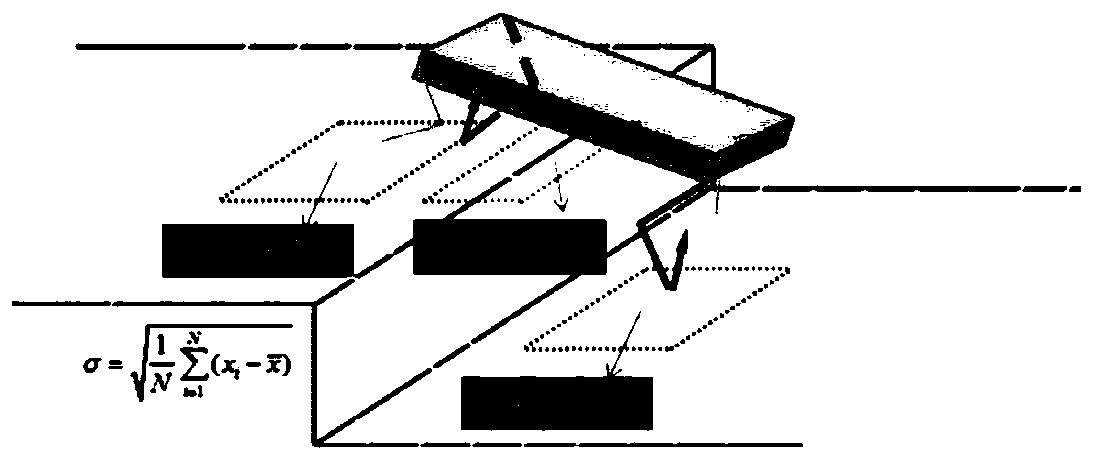
[0032] Step 11: Multi-sensor integration such as airborne camera and laser radar establishes the elevation map of the foothold area, and obtains the elevation information x of the foothold area, as shown in the attached figure 2 shown.
[0033] Step 12: Calculate the terrain relief information σ of the foothold area according to the elevation information of the foothold area, and σ is calculated as follows:
[0034]
[0035] In the formula, N is the number of elevation grids, x i is the elevation value of the i-th grid, and x is the average elevation value of the N grids.
[0036] Step 13: Set...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com