Dynamic concave obstacle crossing method for quadruped robot
A quadruped robot and robot technology, applied in motor vehicles, transportation and packaging, etc., can solve problems such as low efficiency, robots sinking into concave obstacles, and lack of research on local autonomous planning of feet, so as to improve stability and compliance , improve walking efficiency, and realize the effect of dynamic self-adaptation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be described in detail below with reference to the accompanying drawings and examples.
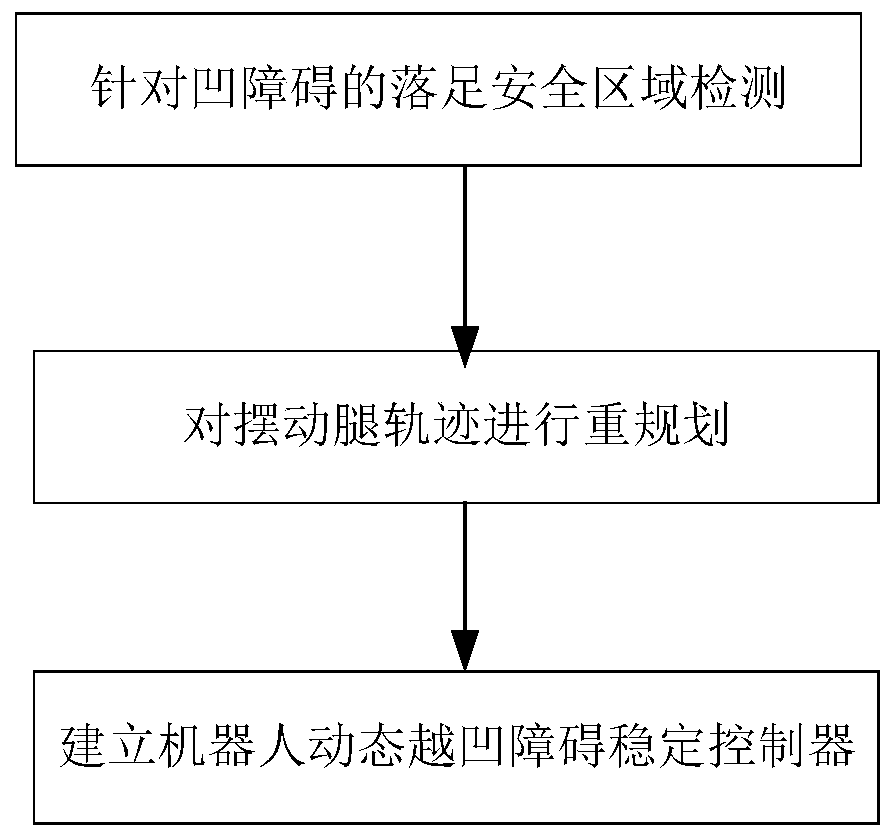
[0029] The invention provides a method for a quadruped robot to dynamically cross concave obstacles. The steps implemented by the method are as follows: figure 1 Shown:
[0030] Step 1, robot concave obstacle landing safety area detection. Specifically include:
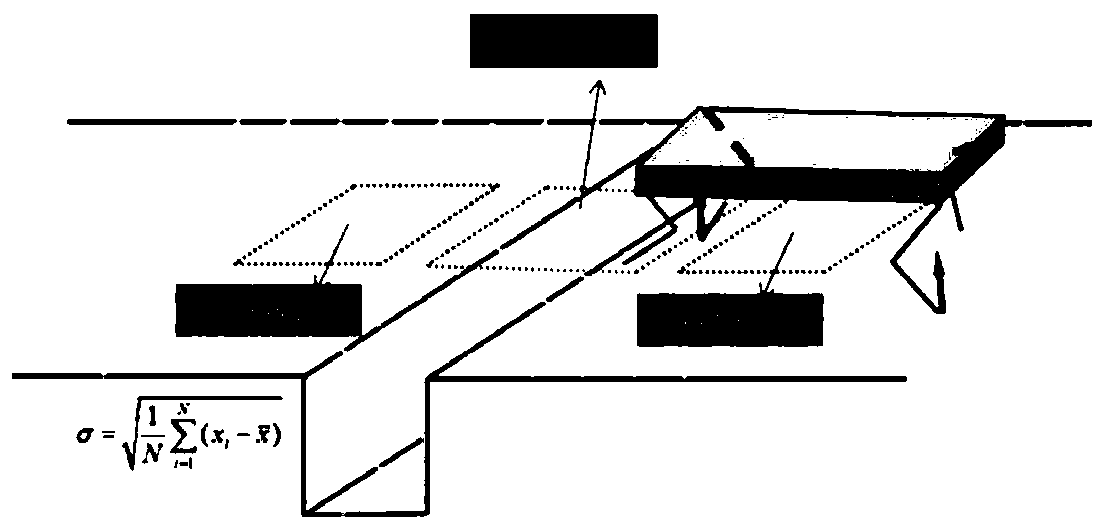
[0031] Step 11: Multi-sensor integration such as airborne camera and laser radar establishes the elevation map of the foothold area, and obtains the elevation information x of the foothold area, as shown in the attached figure 2 shown.
[0032] Step 12: Calculate the terrain relief information σ of the foothold area according to the elevation information of the foothold area, and σ is calculated as follows:
[0033]
[0034] In the formula, N is the number of elevation grids, x i is the elevation value of the i-th grid, is the elevation average of N grids.
[0035] Step 13: Set the ter...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com