A BRDF data acquisition system and method based on UAV-borne hyperspectral imaging
A data acquisition system and hyperspectral imaging technology, applied in control/adjustment systems, vehicle position/route/altitude control, instruments, etc., can solve the problem of inability to measure large scenes and tall objects, difficult moving process, and difficult operation and other problems, so as to improve the efficiency of flight control, achieve precise control, and reduce the workload of measurement and calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0044] The present invention provides a BRDF data acquisition system and method based on UAV-borne hyperspectral imaging, specifically as figure 1 As shown, including auxiliary positioning device, data acquisition unit and measurement and control unit;
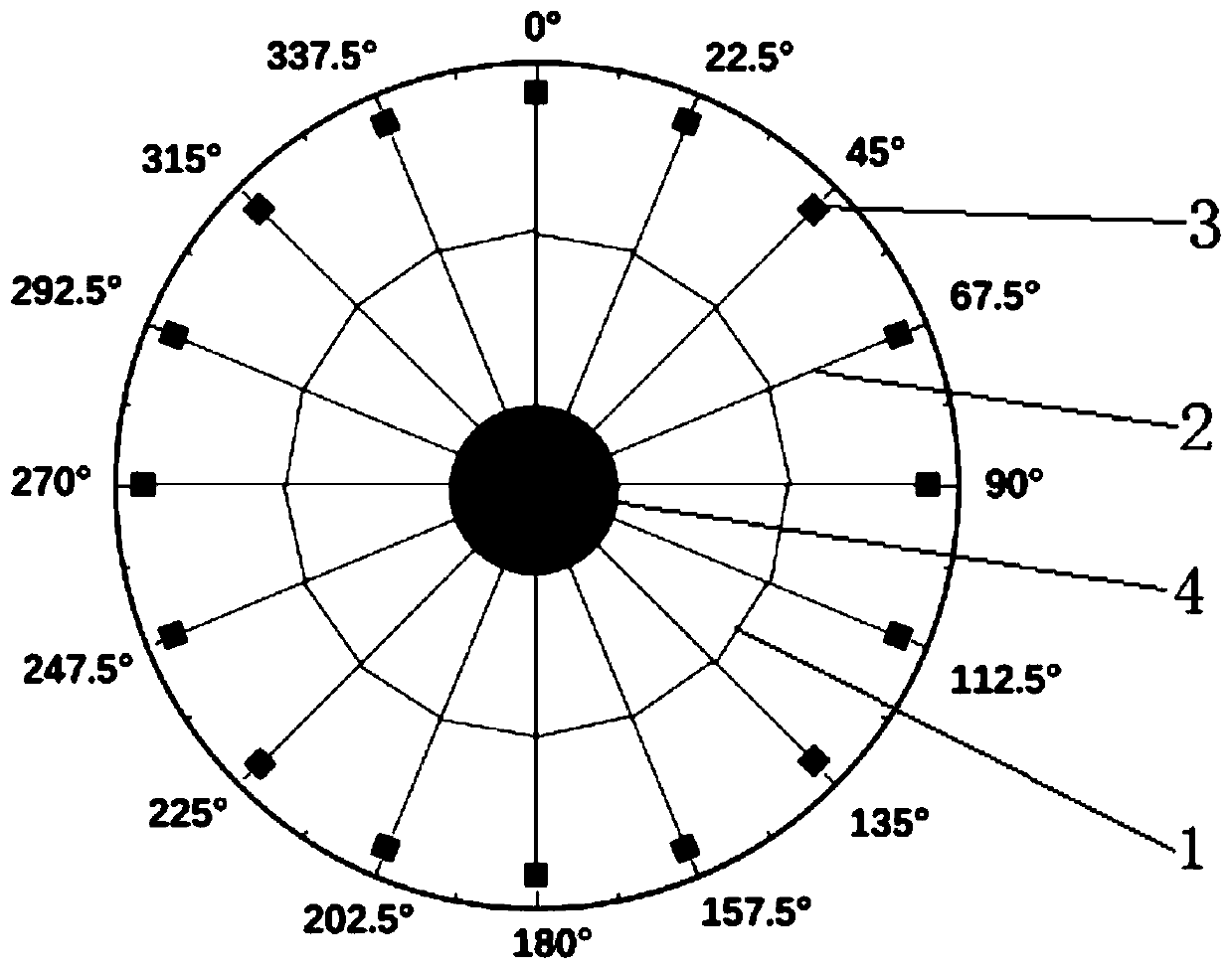
[0045] The auxiliary positioning device is used to identify the position of the observed ground objects / scenes. The auxiliary positioning device includes a disc 1 engraved with an angle line along the circumference, a plurality of measuring ropes 2 and a plurality of ground marking cloths 3 that cooperate with the measuring ropes 2, The center of the disk 1 is provided with a positioning column 4, and one end of a plurality of measuring ropes 2 is evenly fixed on the positioning column 4 along the circumferential direction, and the positioning column 4 is used to determine the ground starting azimuth corresponding to different solar zenith angles. One end of the measuring rope 2 is fixed at the center of the disc 1, and the gr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com