Visual servo control method of multi-task surgical robot
一种手术机器人、机器人的技术,应用在手术机器人领域,能够解决增加患者创伤、费时、增加手术步骤等问题,达到避免安装以及标定与注册过程、使用方法清晰直观、高手术精度的效果
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
[0042] The fracture reduction surgical robot system and method according to the embodiments of the present invention will be described below with reference to the accompanying drawings. First, the fracture reduction surgical robot system according to the embodiments of the present invention will be described with reference to the accompanying drawings.
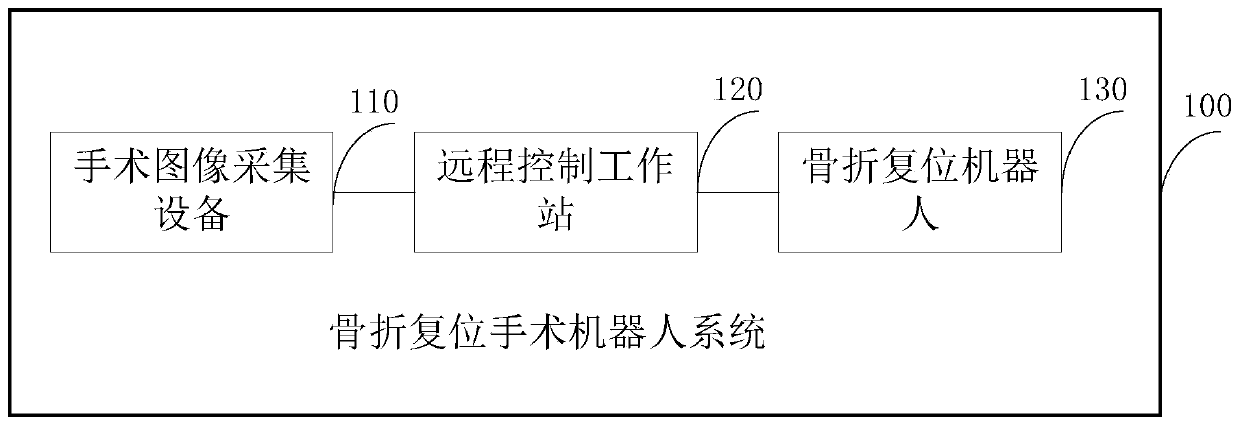
[0043] figure 1 It is a structural schematic diagram of a fracture reduction surgical robot system according to an embodiment of the present invention.
[0044] Such as figure ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com