Mapping method and system based on GPS, IMU and binocular vision
A map construction and binocular vision technology, applied in radio wave measurement systems, satellite radio beacon positioning systems, measurement devices, etc. problem, to achieve the effect of improving robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0127] The present invention is based on GPS, IMU and binocular vision autonomous positioning and map construction method and system, comprising the following steps:
[0128] 1. Initialize the pose of the unmanned vehicle or robot, determine the trajectory of the unmanned vehicle or the movement of the robot, correct the data of the IMU inertial measurement unit and the binocular camera to maintain time consistency, and ensure that they are under the same local area network;
[0129] 2. Carry out information collection and extraction of IMU inertial measurement unit, binocular camera and GNSS receiver based on RTK calculation, so as to track visual features;
[0130] 3. IMU pre-integration based on flow pattern, including: IMU pre-integration calculation, calculation of pre-fraction Jacobian and covariance matrix, calculation of residual Jacobian;
[0131] 4. IMU initialization (visual-inertial joint initialization), which is the first step in the fusion of visual and inertial...
Embodiment 2
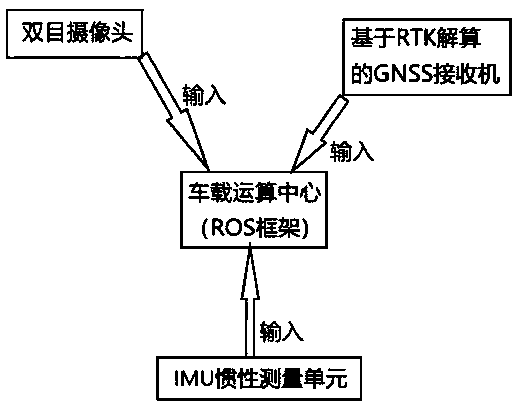
[0142] Such as figure 1 As shown, the map construction system based on GPS, IMU and binocular vision includes a vehicle computing center, a binocular camera, an IMU inertial measurement unit, and a GNSS receiver based on RTK calculation.
[0143] Hardware-level fusion can integrate the binocular camera and IMU on the entire circuit board, and all signal transmission is completed within the circuit board, directly transferring data between the microprocessor controlling the vision system and the microprocessor controlling the IMU In exchange, the performance of the entire system can be improved by upgrading the more detailed information of the environment or target information to the relevant algorithm through visual processing. It is also possible to use pure data interaction and fusion to exchange data between sensors through the data bus. The binocular camera, the IMU inertial measurement unit, and the data output port of the RTK-based GNSS receiver input the collected data...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com