A monocular vision road slope calculation method and its calculation device
A technology of monocular vision and calculation method, which is applied in the direction of camera device and photo interpretation, etc., can solve the problems of measurement error and other problems, achieve good analysis, improve safety, and improve the effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
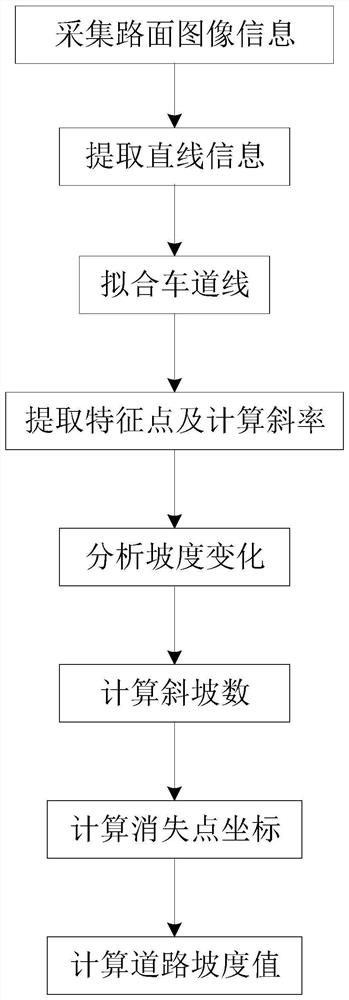
[0047] see figure 1 , the present embodiment provides a monocular vision road slope calculation method, which includes the following steps:
[0048] Step 1, collecting image information of the road surface, and preprocessing the image information;
[0049] Step 2, extract the straight line information in the processed image information, and add constraints to fit the lane line of the road surface;
[0050] Step 3: extract several feature points on opposite sides of the lane line, and calculate the slope between two adjacent feature points on the same side of the lane line; The change law of the slope of the line, and analyze the change of the slope of the road surface;
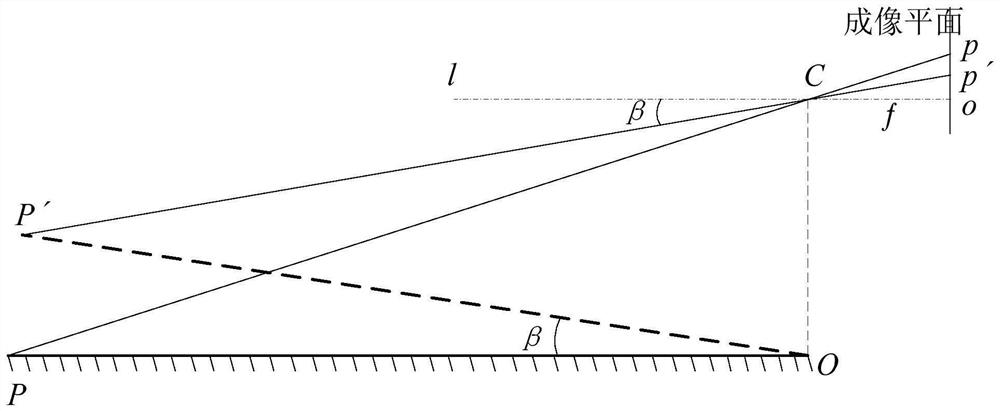
[0051] Step 4, first determine the slope number of the road surface according to the change of the slope, and then calculate the image coordinates of the corresponding vanishing point of the road surface according to the feature points on the lane line;
[0052] Step 5: Calculate the slope value of the road...
Embodiment 2
[0083] This embodiment provides a monocular vision road surface slope calculation device, which applies the monocular vision road surface slope calculation method in Embodiment 1. Wherein, the road surface slope calculation device includes an image acquisition module, a lane line fitting module, a detection module, an image coordinate calculation module and a slope value calculation module, and these modules can be integrated into one calculation chip, or can be set separately.
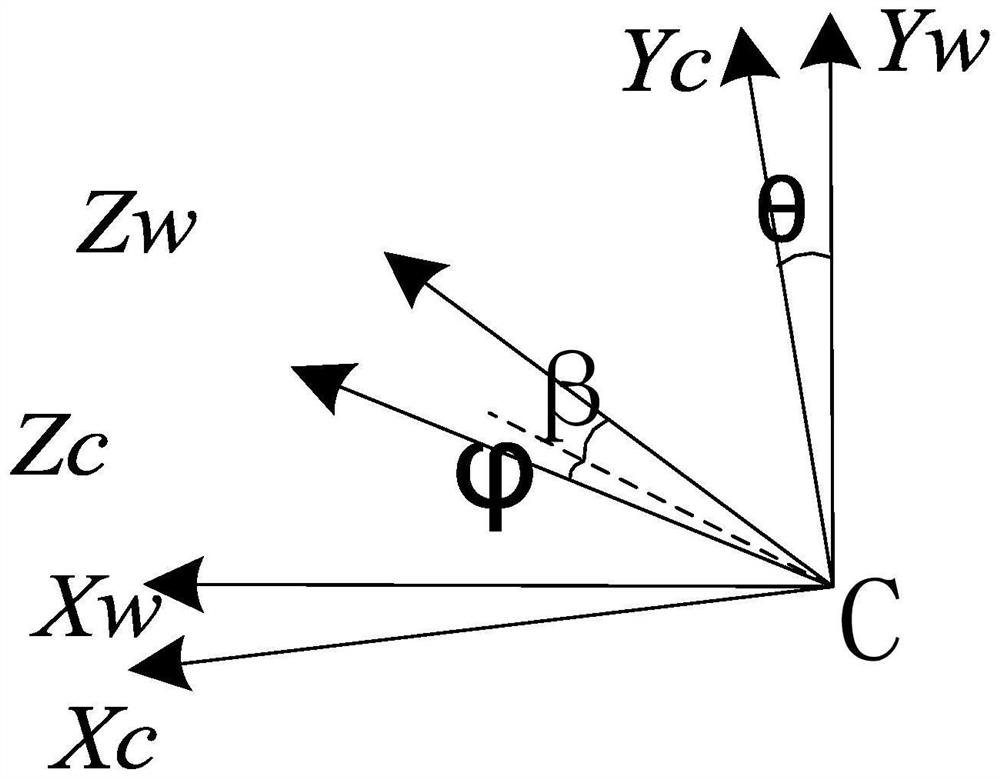
[0084] The image collection module is used to collect the image information of the road surface and preprocess the image information. Wherein, the image acquisition module may include a camera with calibration parameters, and the calibration parameters of the camera include internal parameters and external parameters, and the external parameters include the pitch angle, yaw angle, and rotation angle of the camera. The pitch angle is the angle between the optical axis of the camera and the horizontal p...
Embodiment 3
[0090] This embodiment provides a computer terminal, which includes a memory, a processor, and a computer program stored in the memory and operable on the processor. When the processor executes the program, the steps of the monocular vision road slope calculation method of Embodiment 1 are realized.
[0091] The slope calculation method of Embodiment 1 can be applied in the form of software, such as a program designed to run independently and installed on a computer terminal. The computer terminal can be a computer, a smart phone, a control system, and other Internet of Things devices. The slope calculation method in Embodiment 1 can also be designed as an embedded running program, installed on a computer terminal, such as a single-chip microcomputer.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com