Teaching robot data acquisition system based on optical motion capturing
A technology of data acquisition system and teaching robot, which is applied in the direction of manipulators, program control manipulators, manufacturing tools, etc., and can solve the problems of insufficient stability of data and insufficient distance of infrared laser scanning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be described in further detail below in conjunction with the accompanying drawings.
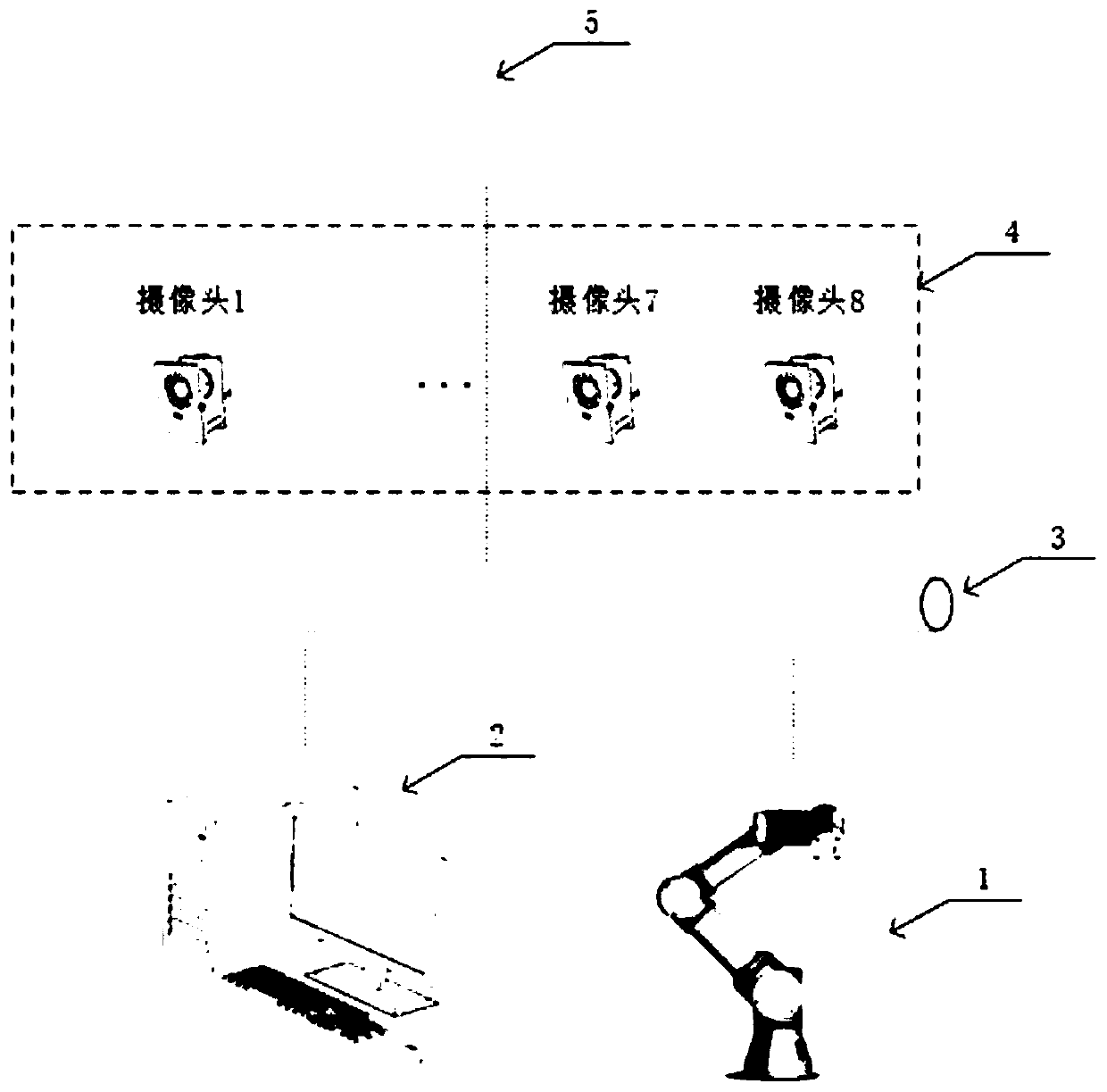
[0059] A teaching robot data acquisition system based on optical motion capture, such as figure 1 As shown, the platform mainly includes: teaching robot 1, robot teaching device processing terminal 2, switch 3, optical capture system camera 4, and operation tool 5. Use the optical capture system camera 4 to calibrate the operation tool and the teaching robot. After the calibration is completed, use the robot teaching device processing terminal 2 to send an acquisition command to the optical capture system camera to collect the position and attitude data of the operation tool 5; The teaching device processing terminal 2 performs data transmission with the optical capture system camera 4 through the switch 3, collects and receives the position and attitude data information of the working tool 5 transmitted from the optical capture system camera 4, and performs ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com