Humanoid biped robot
A bipedal robot and human-like technology, which can be used in motor vehicles, transportation and packaging, etc., can solve the problems of small driving force of the hip joint and knee joint, and achieve the effect of compact overall structure design.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further elaborated and illustrated below in conjunction with the accompanying drawings and specific embodiments. The technical features of each preferred implementation in the present invention can be combined accordingly on the premise that there is no conflict with each other.
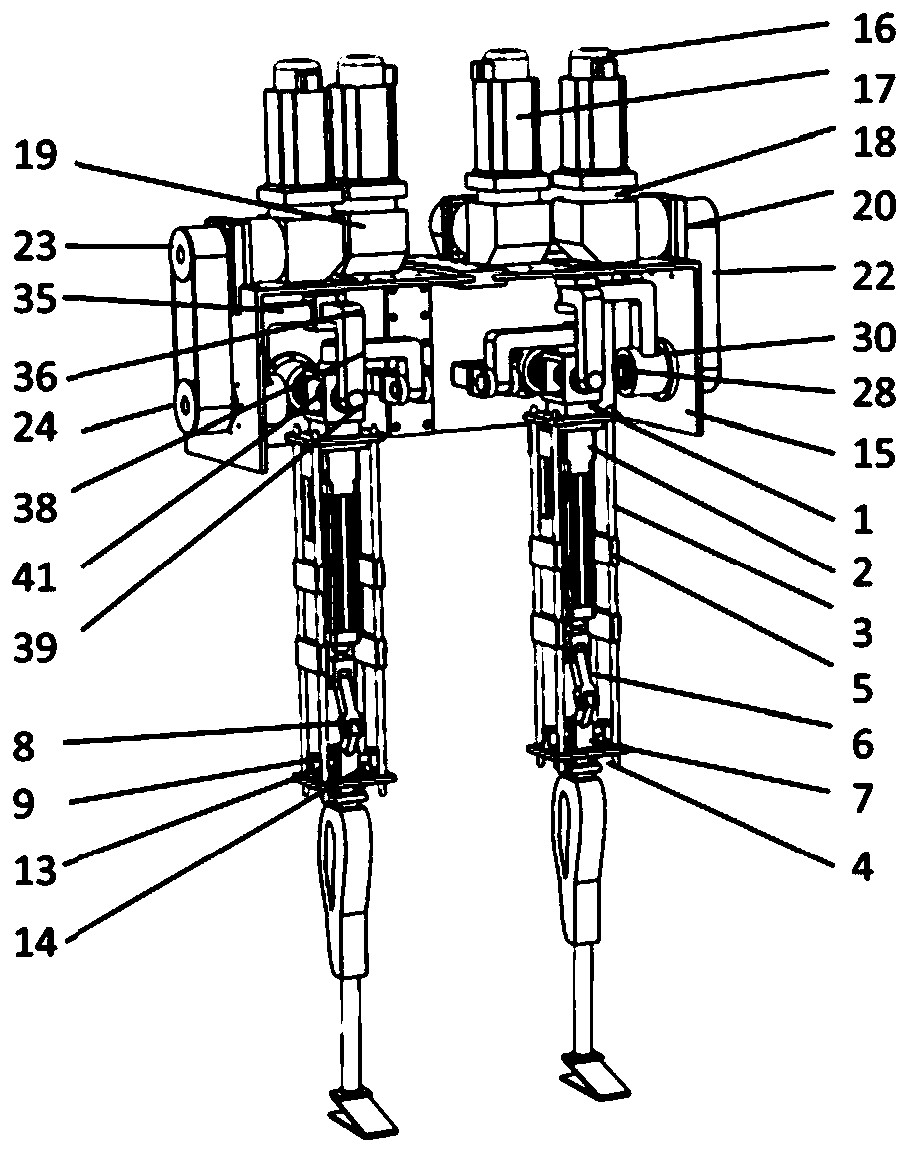
[0031] A humanoid bipedal robot of the present invention includes a thigh structure including a knee joint with light weight and large torque output, and a humanoid hip joint structure with two degrees of freedom for high torque output.
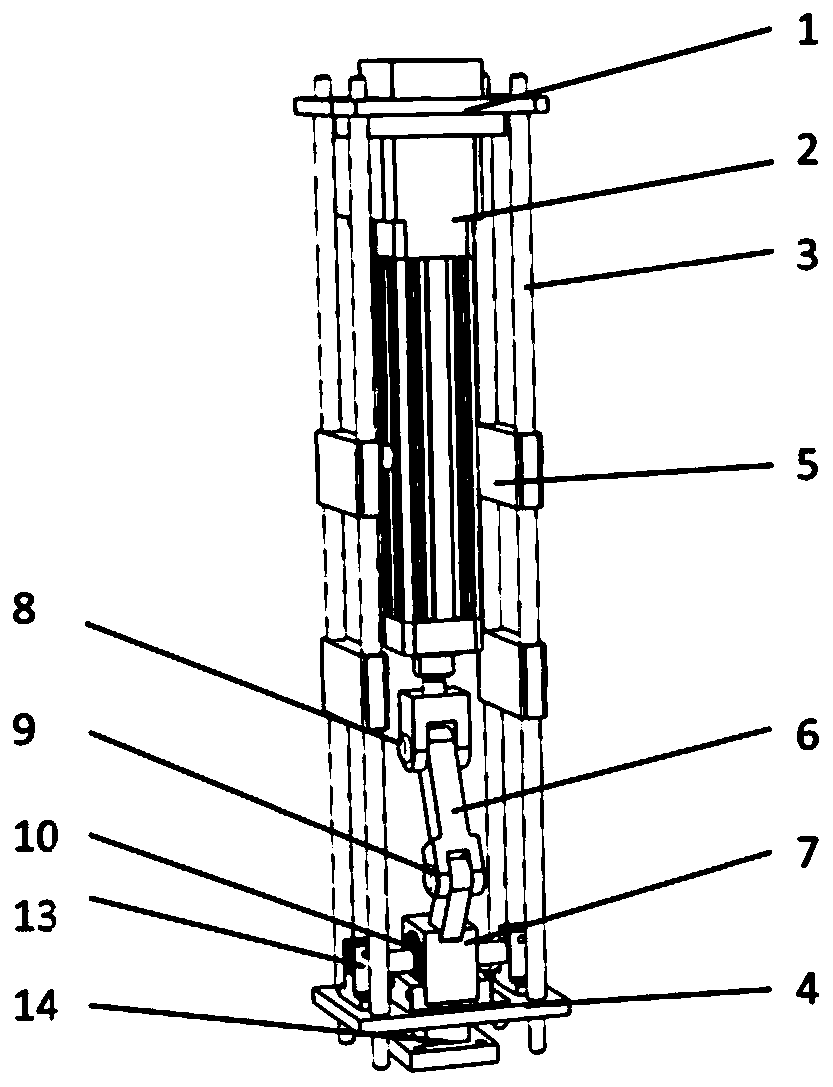
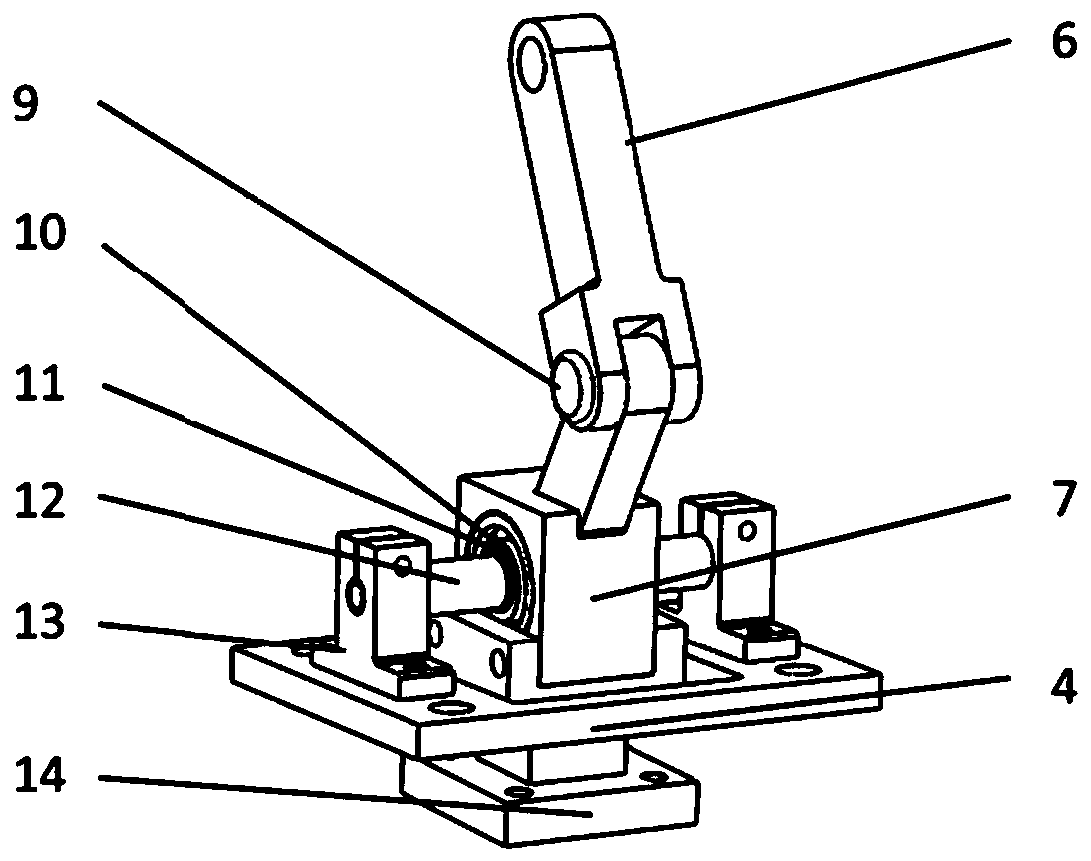
[0032] Among them, the thigh structure of the knee joint with light weight and large torque output makes full use of the space of the thigh structure, and a lightweight knee joint is designed. The AC servo electric push rod is designed and installed in the thigh structure, and the lightweight knee joint is realized through the transmission of the crank linkage mechanism. The single-degree-of-freedom movement of joint large torque...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com