Underwater vehicle positioning method based on baseline geometric structure constraint
An underwater vehicle and geometric structure technology, which is applied to instruments, re-radiation of sound waves, radio wave measurement systems, etc., can solve the problems of positioning failure, affecting the efficiency of task execution, delay and packet loss of underwater acoustic positioning information, etc. To achieve the effect of improving positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, and the present invention includes but not limited to the following embodiments.
[0036] Technical scheme of the present invention comprises the following steps:
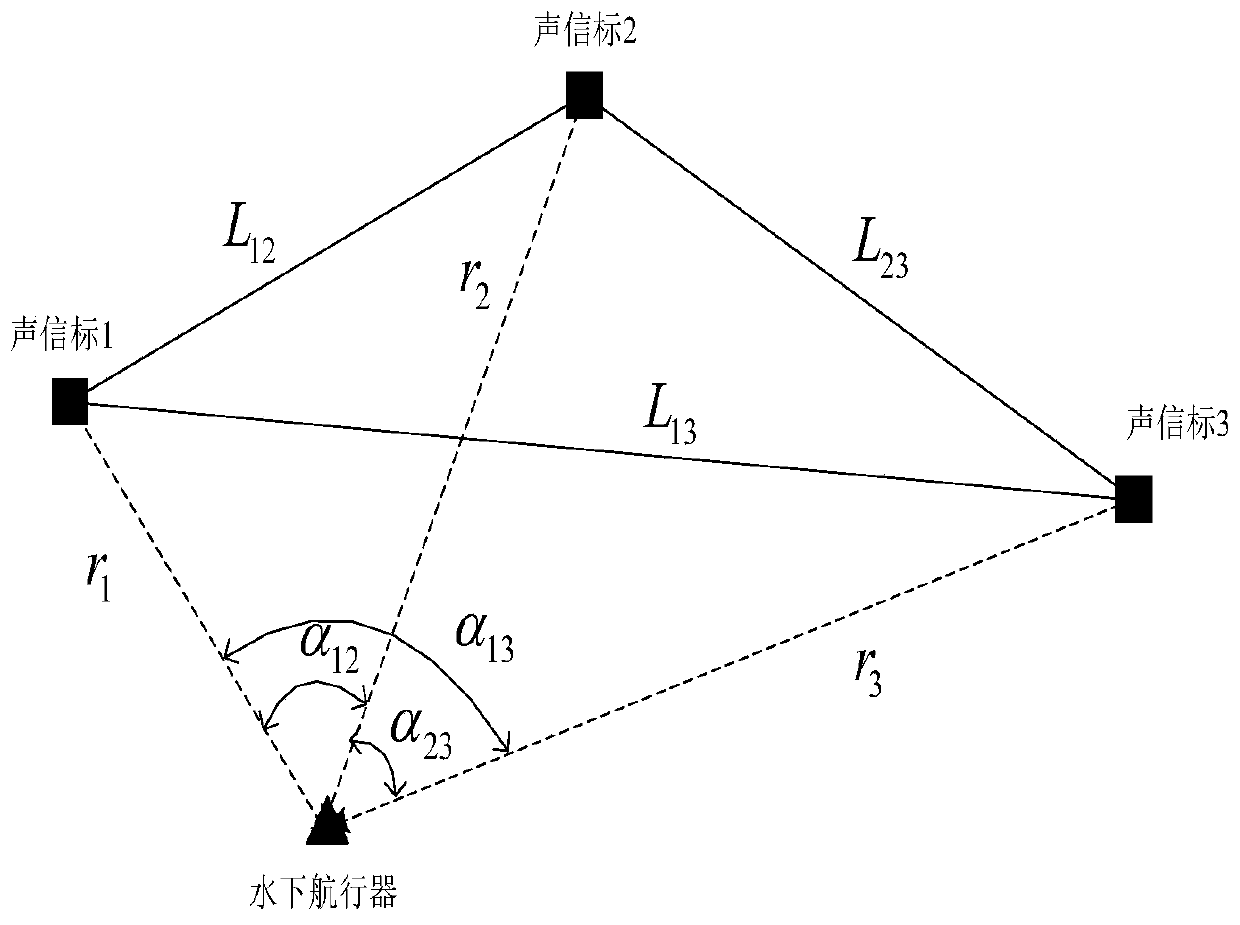
[0037] Step 1: Three underwater acoustic beacons with self-location function broadcast their positions at fixed time intervals (x i ,y i )(i=1, 2, 3), the underwater vehicle uses the received underwater acoustic signal to delay the time Δt i and regional underwater mean speed of sound to calculate the 3D measurement distance between each beacon Use the carried depth gauge to accurately measure the depth value h of the underwater vehicle, and measure the 3D distance l i Convert to Plane 2D Measure Distance
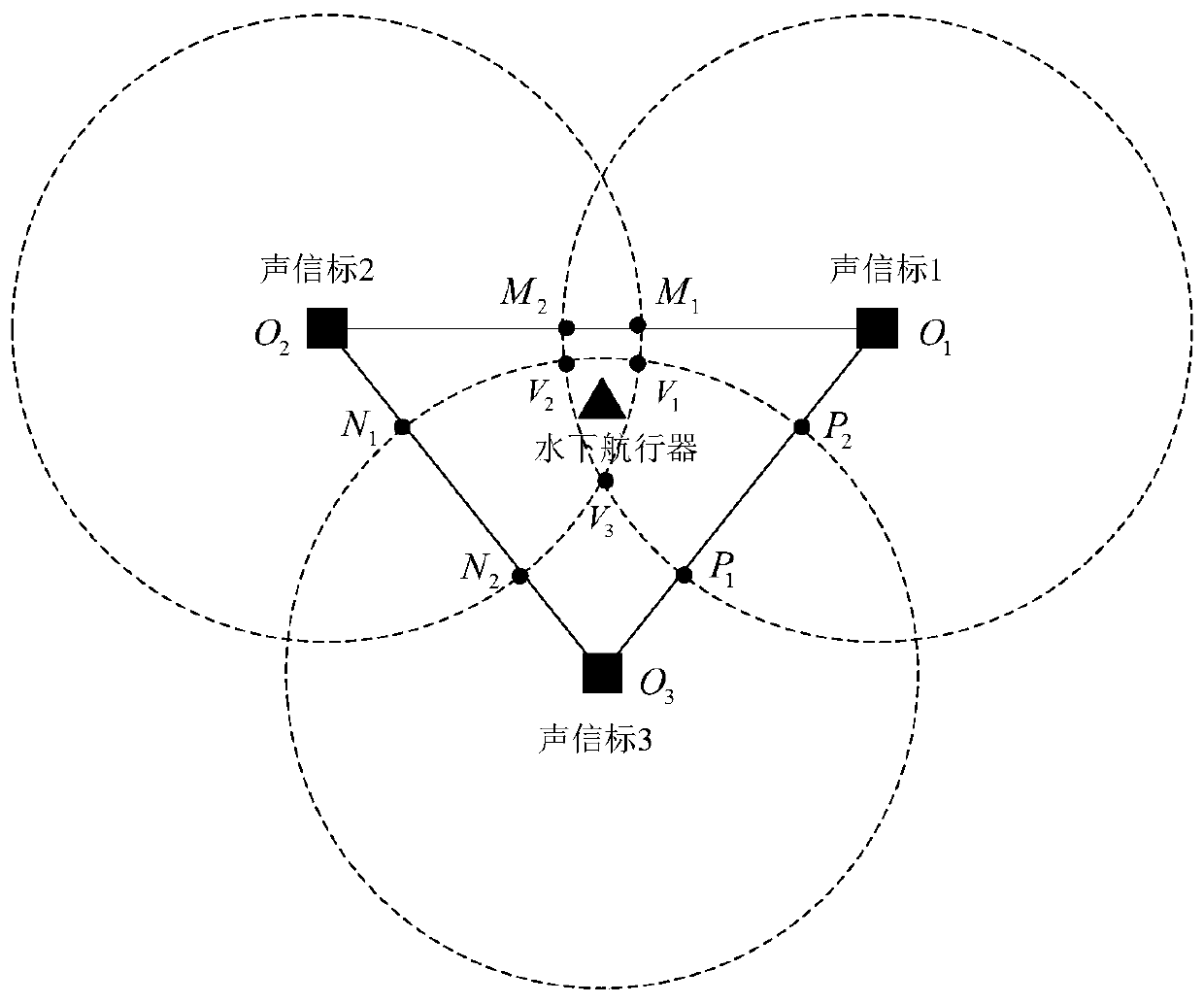
[0038] Step 2: Calculate the distance L between two beacons (that is, the positioning baseline) based on the known beacon positions ij (i, j=1, 2, 3 and i≠j), use the geometric st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com