A device and method for positioning a robotic arm based on laser scanning
A laser scanning and positioning device technology, which is applied in the direction of using optical devices, measuring devices, instruments, etc., can solve problems such as dimensional errors, geometric errors, interference, etc., to improve efficiency and accuracy, improve positioning accuracy, and reduce poses effect of error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The implementation of the present invention will be described in detail below in conjunction with the accompanying drawings and examples, so as to fully understand and implement the implementation process of how to apply technical means to solve technical problems and achieve corresponding technical effects in the present invention. The embodiments of the present application and the various features in the embodiments can be combined with each other under the premise of no conflict, and the formed technical solutions are all within the protection scope of the present invention.
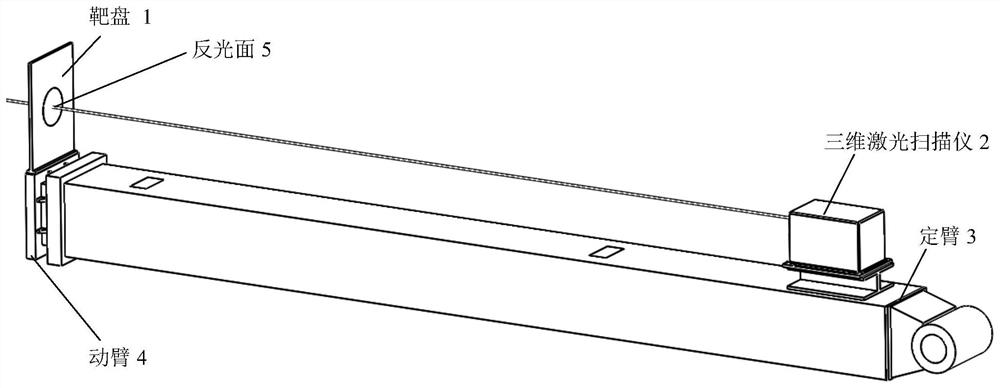
[0029] In this embodiment, taking a multi-functional operation trolley as an example, based on the structure of the boom of this trolley, it can be determined that the deformation of the telescopic arm is the most important reason for the low positioning accuracy of the boom of the trolley. The method of direct measurement on site is determined. Briefly speaking, the principle of the present in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com