Online robot collision detection method and system based on momentum model
A collision detection and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of amplifying the encoder measurement error, difficult to meet the real-time requirements of the system, and consuming large computing resources. Collision detection accuracy and the effect of reducing design difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
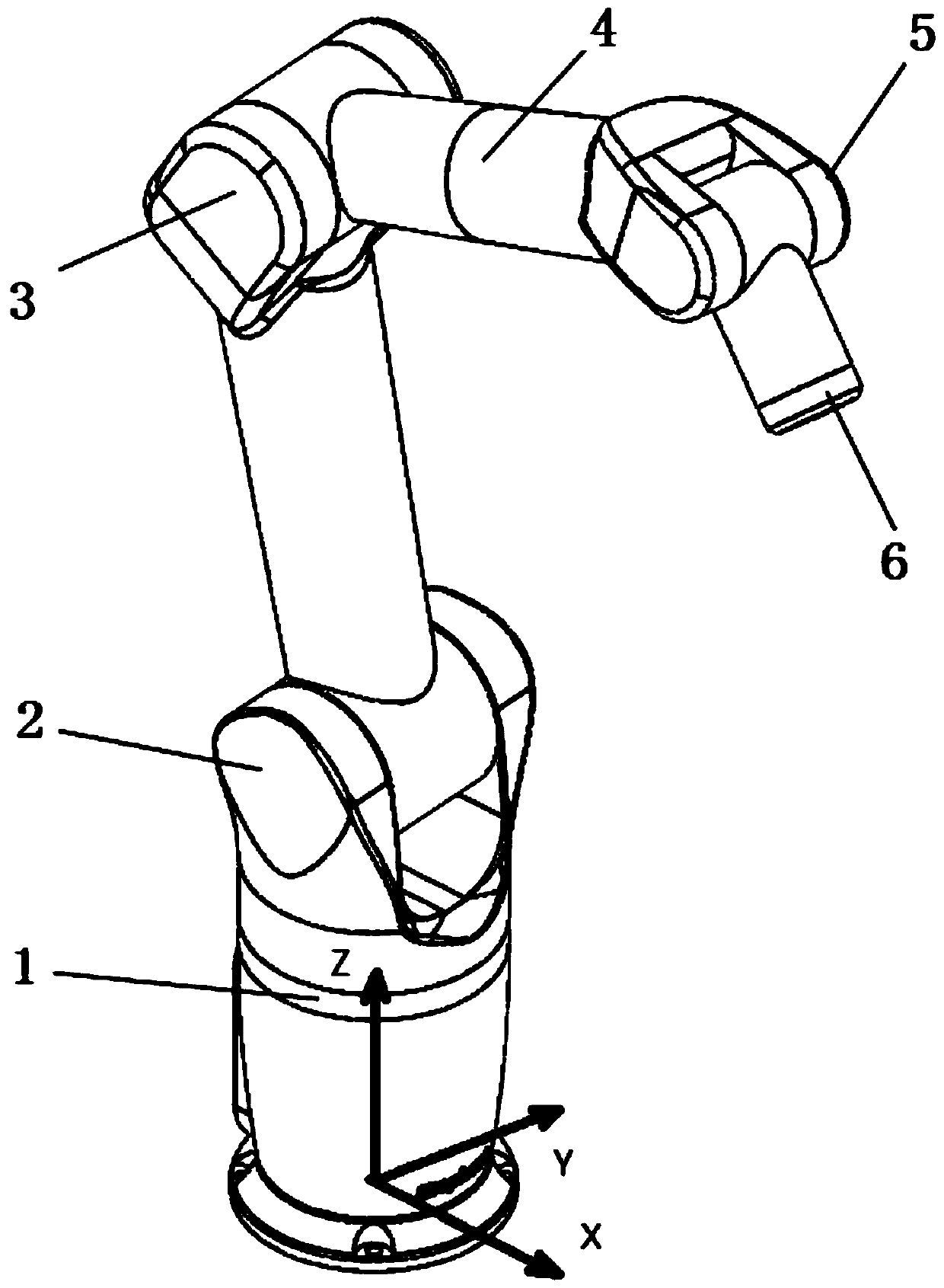
[0066] According to an online collision detection method for a robot based on a momentum model described in the present invention, the six-degree-of-freedom mechanical arm is used as the research object for verification, such as figure 1 Joints 1-6 are shown, and the structural parameters of the research object, namely the DH parameters, are as follows:
[0067] Joint number
α(°)
a(mm)
q(°)
d(mm)
1
-π / 2
0
q1
0
2
0
330
q2
0
3
0
320
q3
117
4
-π / 2
0
q4
0
5
π / 2
0
q5
115.5
6
0
0
q6
0
[0068] where α(°) is the link torsion, which represents the angle by which the axis of one joint is rotated about their common normal relative to the axis of the other joint;
[0069] a (mm) is the length of the connecting rod, indicating the common normal length between the axes of the two joints;
[0070] q(°) is the joint rotation angle, which means the common no...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com