A time-varying event trigger filtering method with data loss under an unknown probability condition
A technology of data loss and event triggering, which is applied to electrical components, digital technology networks, impedance networks, etc., can solve the problems affecting filter performance, data loss and random non-linearity of unknown probability, and event triggering mechanism that cannot be dealt with at the same time. Achieve the effect of easy solution and realization, and relative error reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
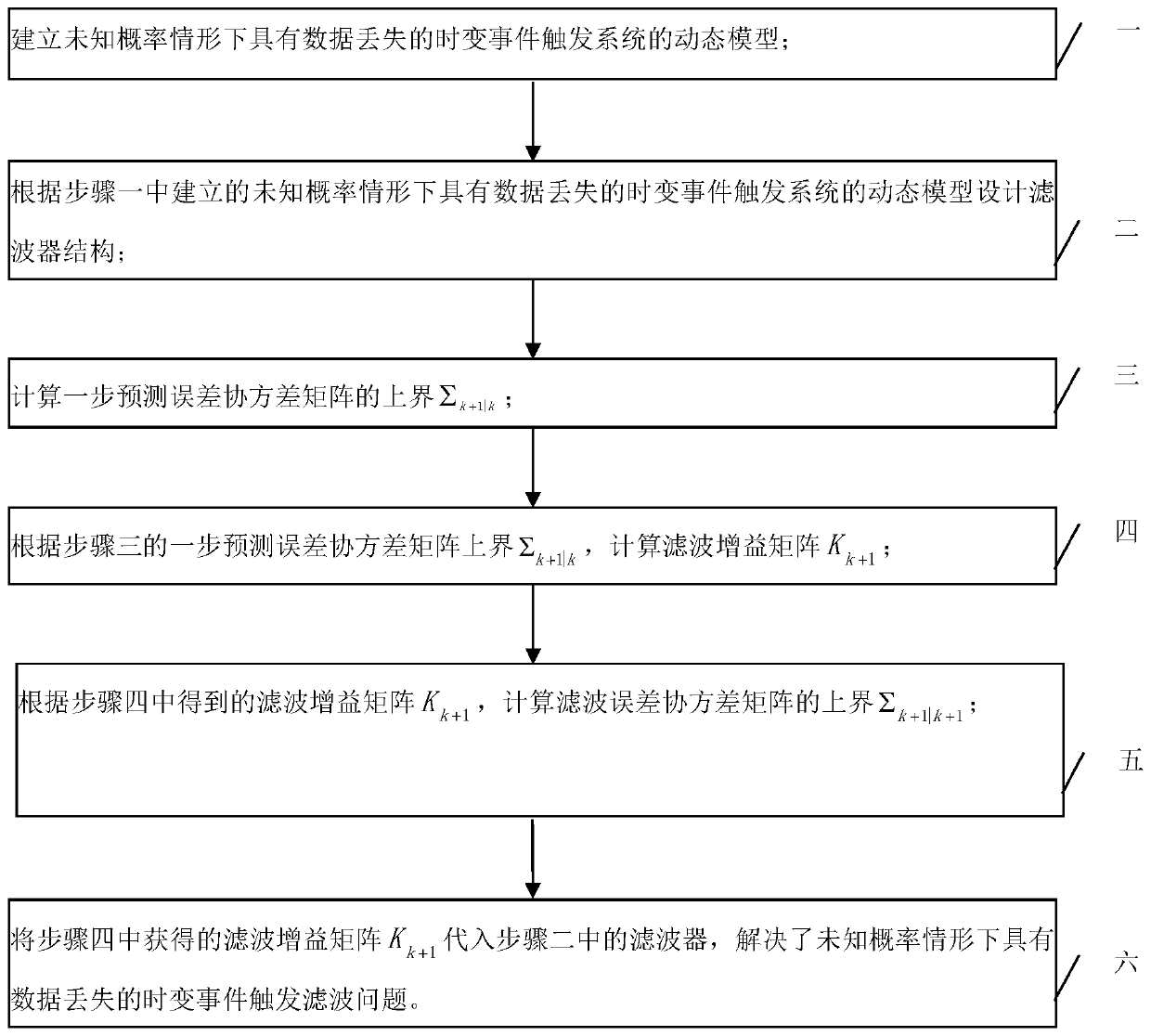
[0021] The time-varying event-triggered filtering method with data loss under the unknown probability situation of this embodiment, the method includes the following steps:
[0022] Step 1. Establishing a dynamic model of a time-varying system with unknown probability of data loss, stochastic nonlinearity, and event-triggered mechanism;
[0023] Step 2. Design the structure of the filter according to the dynamic model of the time-varying system with unknown probability of data loss, random nonlinearity and event trigger mechanism established in step 1;
[0024] Step 3, calculating the upper bound of the one-step prediction error covariance matrix of the dynamic model at time k;
[0025] Step 4, according to the upper bound of the one-step prediction error covariance matrix in step 3, calculate the filter gain matrix at k+1 moment;
[0026] Step 5. Substituting the gain matrix at time k+1 obtained in step 4 into the filter equation in step 2 to obtain an estimate at time k+1 ...
specific Embodiment approach 2
[0028] The difference from the first embodiment is that the time-varying event-triggered filtering method with data loss in the case of unknown probability in this embodiment, in the first step, the established data loss with unknown probability, random non-linearity and event-triggered filtering method The state-space form of the dynamic model of the time-varying system of the mechanism is:
[0029] x k+1 =(A k +ΔA k )x k +α k f(x k )+B k ω k (1)
[0030] the y k =λ k C k x k +ν k (2)
[0031] where x k is the state variable of the system at time k, y k is the measurement output; f(x k ) is a nonlinear continuous differentiable function; ω k is mean zero variance Q k process noise; ν k is mean with zero variance for R k measurement noise; A k is the system matrix, C k is the measurement matrix at time k, B k is the noise distribution matrix; ΔA represents the unknown of the system, and satisfies the norm bounded uncertainty, ΔA=M 1 f 1,k N 1 ,M 1 ...
specific Embodiment approach 3
[0035] The difference from the second specific embodiment is that the time-varying event-triggered filtering method with data loss in the case of unknown probability in this embodiment, in the above-mentioned step 2, according to the data loss with unknown probability established in step 1, random The process of designing filters for dynamic models of time-varying systems with linear and event-triggered mechanisms, specifically:
[0036] First, select the following event trigger formula:
[0037]
[0038] In the formula, Indicates the measurement output at the trigger moment of the latest event, δ indicates the known adjustment threshold and δ>0, express the transpose of y k+l Indicates the measured value at the current moment, then the actual output of the system at time k is as follows:
[0039]
[0040] is the actual output value at time k, k i Indicates the initial trigger moment;
[0041] Then, design the filter:
[0042]
[0043]
[0044] In the for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com