An industrial mechanical arm carrying path planning method based on a time-varying directed graph
A technology for path planning and industrial machinery, applied in data processing applications, forecasting, computing, etc., and can solve problems such as non-global optimal paths
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0045] In order to enable those skilled in the art to better understand the technical solutions of the present application, the present invention will be further described in detail below in conjunction with specific embodiments and accompanying drawings.
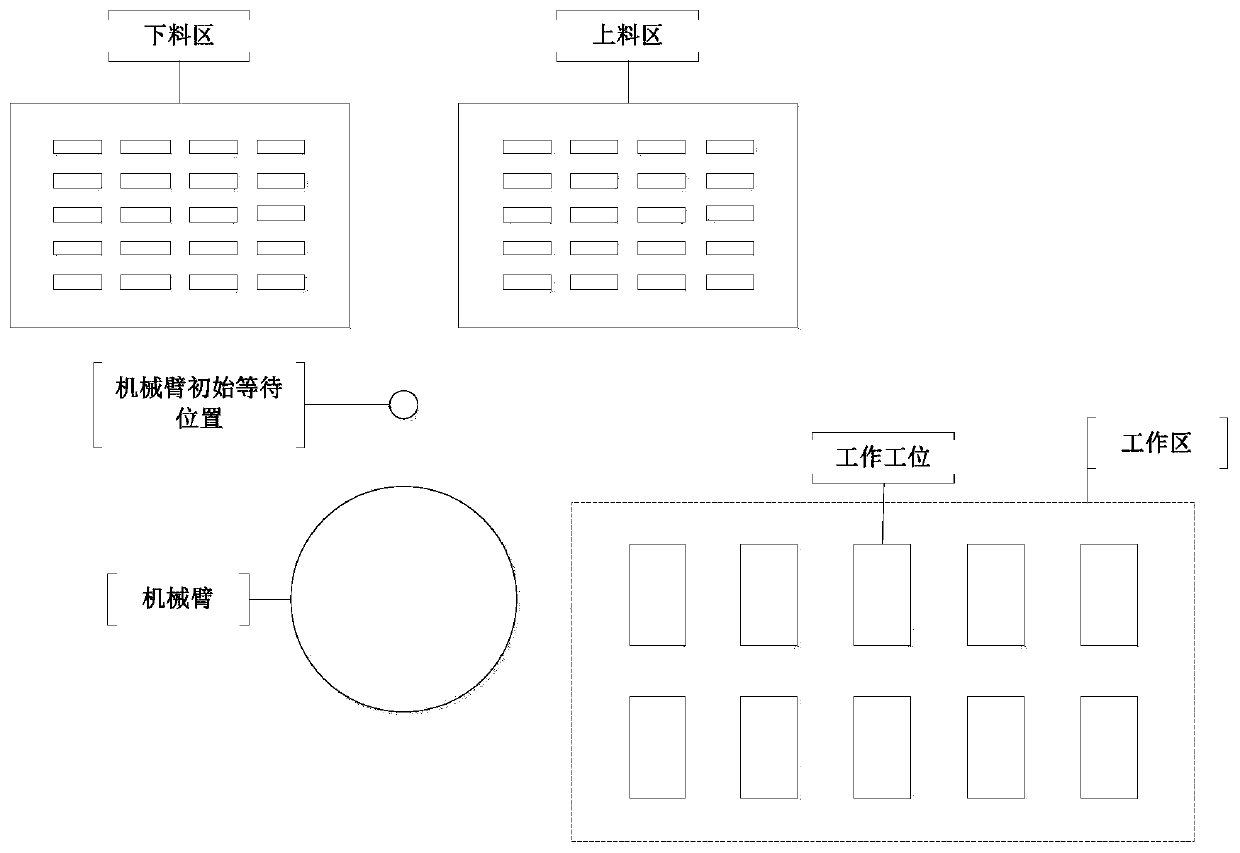
[0046] In the industrial field, it is often necessary to move the product from the loading area to the working area, and then move the product to the unloading area after the operation is completed, such as figure 1 shown. When planning the moving path, the optimization problem of the moving path is generally transformed into the shortest path problem of directed graph traversal through the directed graph, and then a variety of path planning algorithms can be used to solve the design problem of the moving path. This embodiment records a method for planning a transport path of an industrial manipulator based on a time-varying directed graph, which solves the problem of unpredictability of the path in the prior art, and solve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com