


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
An automatic driving vehicle cross-border transportation system and related equipment
A technology for autonomous driving and transportation systems, applied in data processing applications, instruments, computing, etc., can solve the problems of long customs clearance time, waste of human resources, what drivers cannot do, etc., to reduce the number, reduce labor costs, improve efficiency and effect of speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
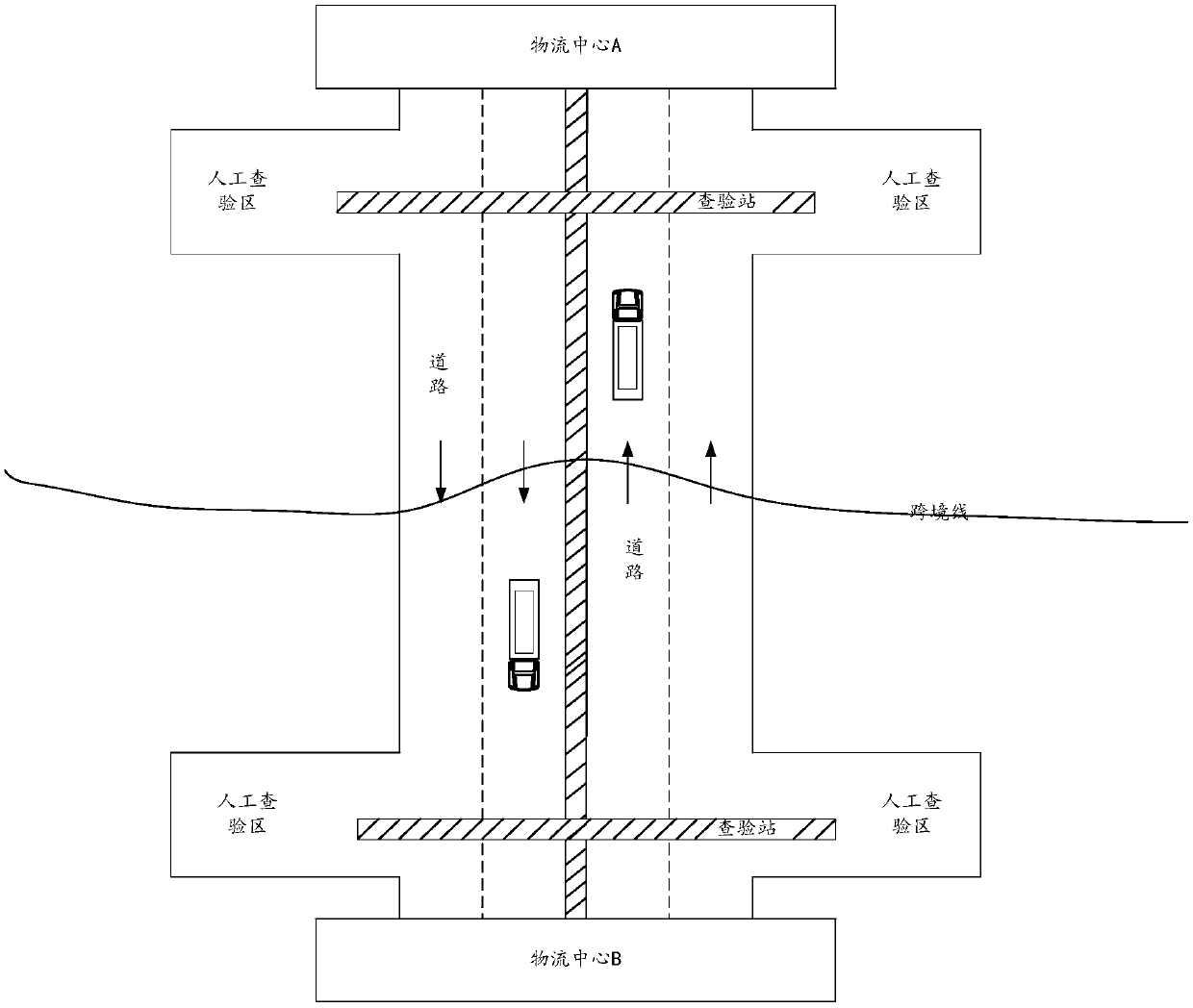
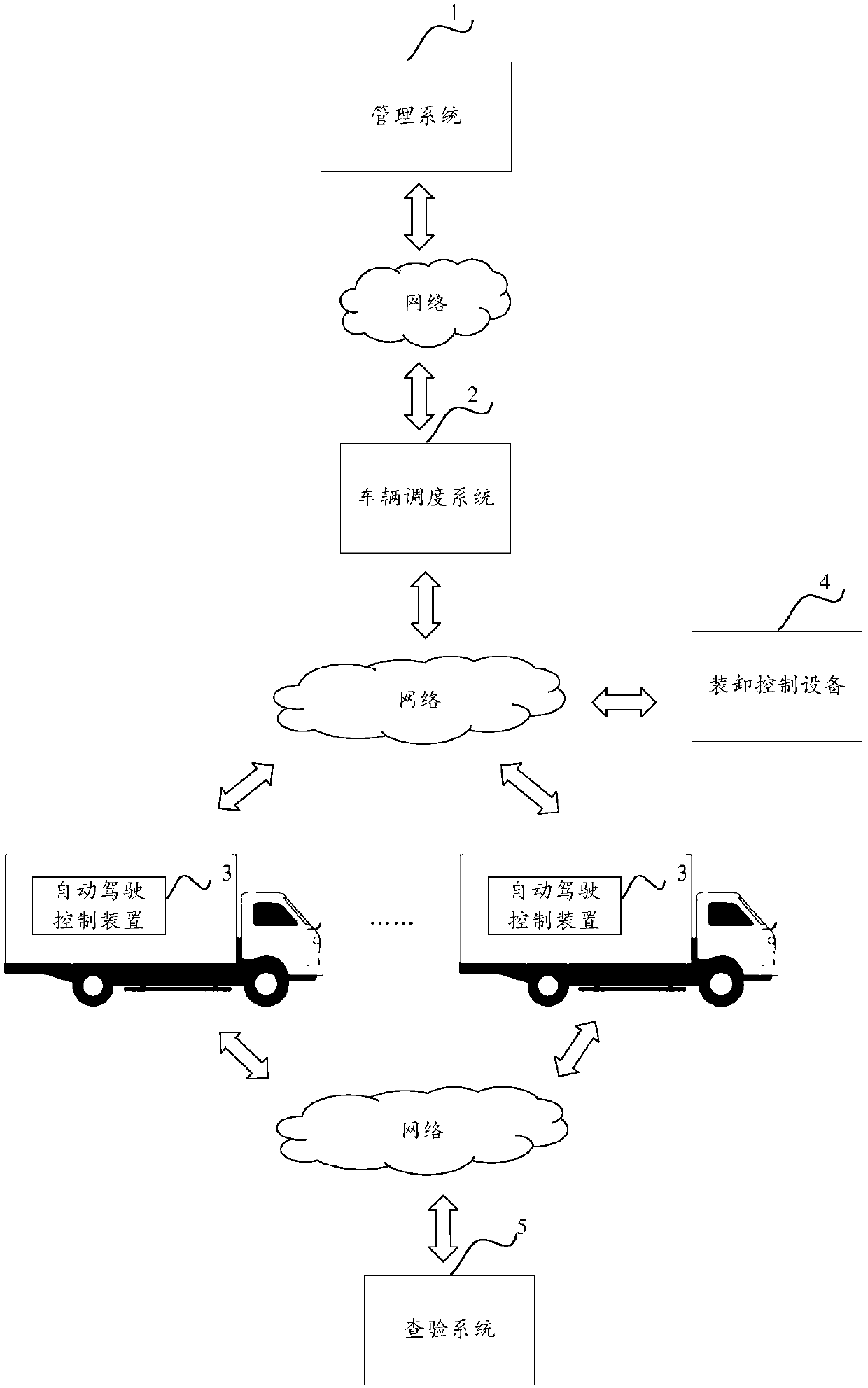
[0030] see figure 2 , is a schematic diagram of the structure of the self-driving vehicle cross-border transportation system in the embodiment of the present invention. There are logistics centers on both sides of the cross-border line, and there are dedicated two-way roads between the logistics centers on both sides of the cross-border line. At least one inspection station is set on the special two-way road, the logistics center is equipped with loading and unloading control equipment, vehicle dispatching system and management system, and the inspection station is equipped with an inspection system. The self-driving vehicle cross-border transportation system includes a management system 1, a vehicle dispatching system 2, an automatic driving control device 3, loading and unloading control equipment 4, and an inspection system 5, wherein:
[0031] The management system 1 is used to manage cargo information; generate a transportation plan according to the cargo information, an...
Embodiment 2
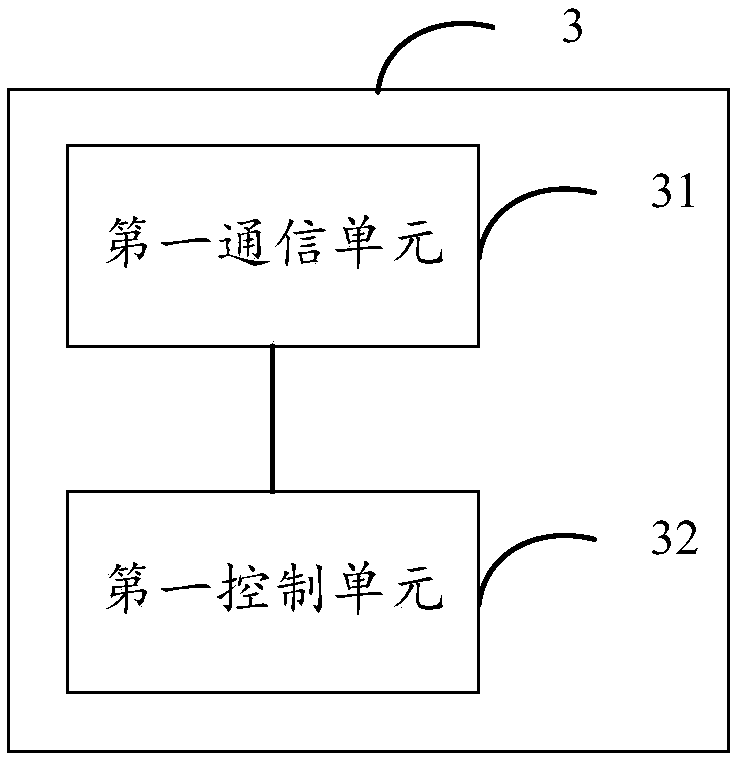
[0129] Based on the same idea of the self-driving vehicle cross-border transportation system provided in the first embodiment, the second embodiment of the present invention provides an automatic driving control device 3, the structure of which is as follows image 3 As shown, it includes a first communication unit 31 and a first control unit 32, wherein:
[0130] A first communication unit 31, configured to send and receive information;
[0131] The first control unit 32 is configured to control the self-driving vehicle to complete the transportation according to the transportation task when receiving the transportation task through the first communication unit 31; and, when driving to the inspection station on the dedicated two-way road during the transportation, Controlling the self-driving vehicle for customs inspection.
[0132] In some embodiments, if the transportation task indicates loading goods at the starting point of cargo transportation, the transportation task...
Embodiment 3
[0160] Based on the same concept of the self-driving vehicle cross-border transportation system provided in the first embodiment, the third embodiment of the present invention provides an inspection system 5, the structure of which is as follows Figure 4 As shown, it includes a second communication unit 51 and an inspection unit 52, wherein:
[0161] The second communication unit 51 is used to send and receive information;
[0162] The inspection unit 52 is configured to conduct customs inspection on the self-driving vehicle, release the self-driving vehicle when the inspection passes, and instruct the self-driving vehicle to accept manual inspection when the inspection fails.
[0163] The inspection unit 52 is specifically configured to: when an automatic driving vehicle driving into the inspection station is detected, identify the identity information of the automatic driving vehicle, and send a message to the automatic driving control device of the automatic driving vehicl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com