Snake-like winding soft actuator
A technology of actuators and software, applied in the direction of manufacturing tools, manipulators, etc., to achieve the effect of simple structure, strong grasping ability, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
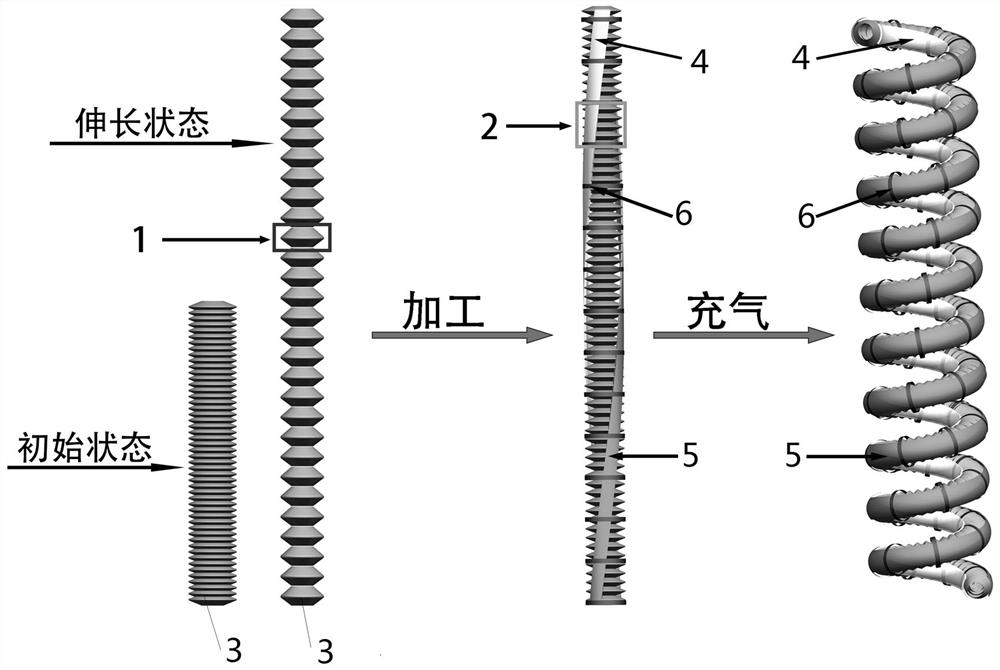
[0044] The snake-like winding soft actuator of this embodiment includes an elastic bellows, an elastic stretch layer, a fixed connector, an air pipe for connecting with an air source, and a strain limiting layer. Among them, one end of the elastic bellows is closed, and the other end of the elastic bellows is connected to the air pipe; in this structure, the air source can inflate and deflate the elastic bellows through the air pipe, thereby realizing the work of winding the actuator.
[0045] In this embodiment, the elastic corrugated tube is an elastic corrugated hose with a folding unit, and the fixed connector is an elastic O-shaped plastic ring, and there are several elastic O-rings. The strain limiting layer is arranged on the side wall of the elastic bellows; based on the different bending modes of the winding actuator, the strain limiting layer and the elastic expansion layer can be arranged symmetrically or alternately with respect to the central axis of the elastic be...
Embodiment 2
[0058]Different from Embodiment 1, the corresponding strain-limiting layer is removed in this embodiment, and a winding actuator without a strain-limiting layer is provided. The winding actuator in this embodiment includes an elastic bellows, an elastic stretch layer, a fixed connector, and an air pipe for connecting with an air source. Among them, one end of the elastic bellows is closed, and the other end of the elastic bellows is connected to the air pipe; in this structure, the air source can inflate and deflate the elastic bellows through the air pipe, thereby realizing the work of winding the actuator.
[0059] In this embodiment, the elastic corrugated pipe is a corrugated hose, and the fixed connector is an elastic O-shaped plastic ring, and there are several elastic O-rings. The elastic stretchable layer is connected with the elastic bellows through the elastic O-ring, that is, the elastic stretchable layer is bound on the elastic bellows through the elastic O-ring. ...
Embodiment 3
[0062] Further, this embodiment discloses the practical application of the snake-like winding soft actuator. More specifically, this example presents a series of new species of soft robots including a dual-purpose device for wrapping and wrapping and a three-finger gripper.
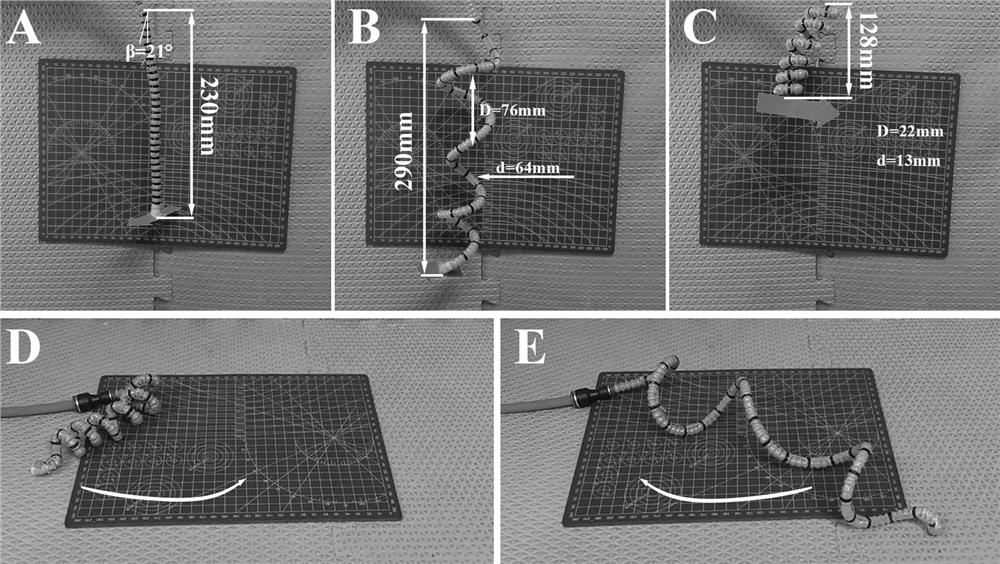
[0063] Based on the implementation of snake-like winding software, a powerful soft hook is made, such as Figure 8 A. Figure 8 Shown in B. Such a soft hook is relatively easy to manufacture, and it only needs to set the strain-limiting layer and the elastic expansion layer symmetrically along the elastic bellows. The excellent airtightness of the soft hook makes it capable of salvaging floating or sinking objects in water (such as Figure 8 C. Figure 8 D). At the same time, it hooks objects of various shapes ( Figure 8 E to Figure 8 G,). In the ultimate load-bearing experiment, the weight of the soft hook is only 8g, and it can lift 4.25kg of books, which is more than 530 times its own weight ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com