Cooperative control method for target capturing by space dual-arm robot
A space robot and control method technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as occupying space orbit resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0075] The above content is only to illustrate the technical ideas of the present invention, and cannot limit the protection scope of the present invention. Any changes made on the basis of the technical solutions according to the technical ideas proposed in the present invention shall fall within the scope of the claims of the present invention. within the scope of protection. The content that is not described in detail in the specification of the present invention belongs to the well-known technology of those skilled in the art.
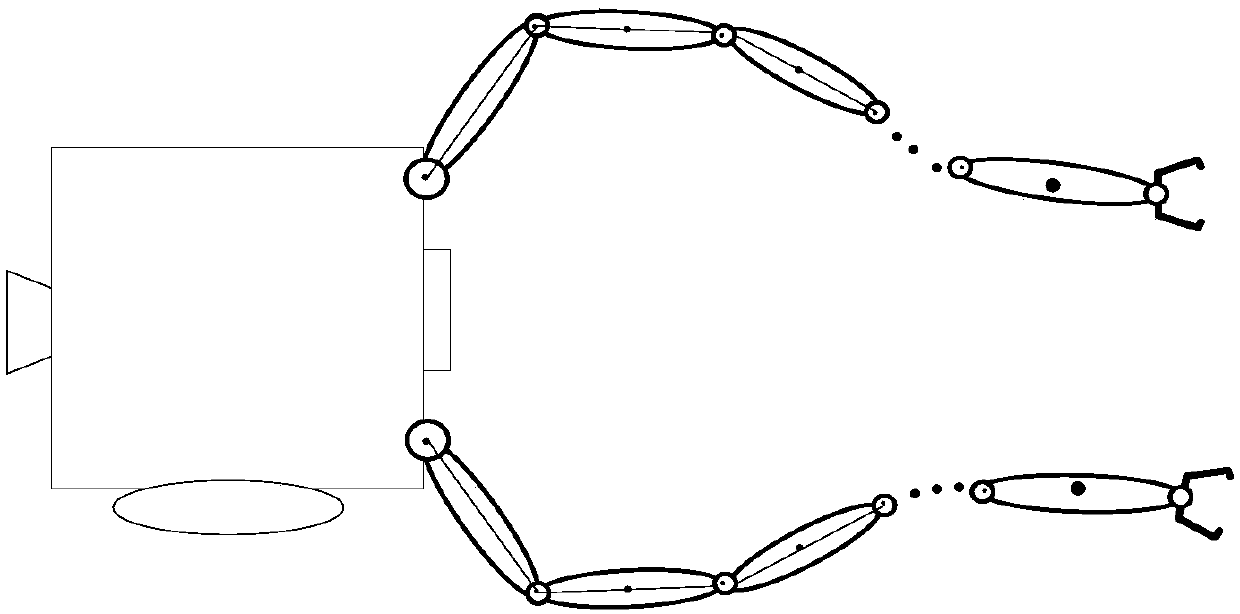
[0076] In order to set forth the technical solution of the present invention more clearly, the technical solution of the present invention is described below through the examples. Aiming at the capture problem of space dual-arm robots, the present invention provides a cooperative control method for capturing rolling targets, which ensures the time consistency of the target capture by both arms, and then achieves a high The purpose of precision cap...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com