AUV (Autonomous Underwater Vehicle) three-dimensional path planning method based on reinforcement learning
A technology of path planning and reinforcement learning, applied in 3D position/channel control, navigation calculation tools, etc., can solve problems such as increasing the difficulty of AUV control, and achieve the effect of improving adaptability, reducing learning time, and improving learning efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] A detailed description will be given below in conjunction with the accompanying drawings.
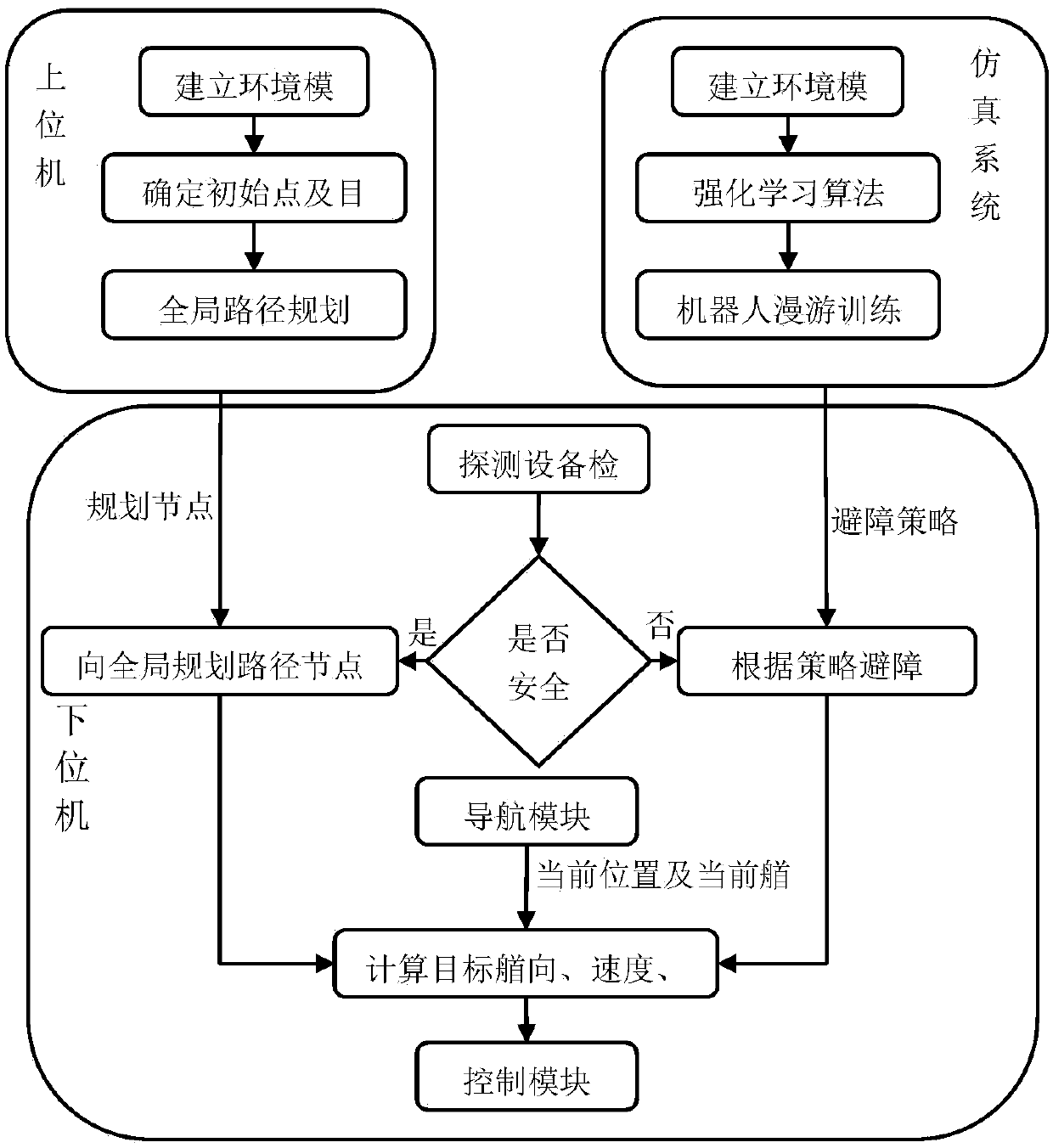
[0072] like figure 1 As shown, the AUV path planning system designed in the present invention mainly includes 3 modules: the AUV global path planning host computer module based on Q learning, the AUV obstacle avoidance training simulation module based on the self-organizing competitive neural network improved Q learning method, and the AUV obstacle avoidance training simulation module based on the Q learning method. The AUV local path planning lower computer module of the obstacle strategy; the upper computer module is the robot console responsible for sending commands to the robot, the lower computer module is responsible for executing the commands for the AUV itself, and the simulation training module is the robot simulation system responsible for training the robot obstacle avoidance strategy and adjustment Control parameters; the operation process is: establish an environment...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com