Quadcopter toy with automatic retreat and control method thereof
A technology for quadcopters and toys is applied in the field of aircraft toys, and can solve the problems such as the requirement for increased ranging accuracy of a level rangefinder, complex algorithms, and the failure of the quadcopter toy to ensure detection.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
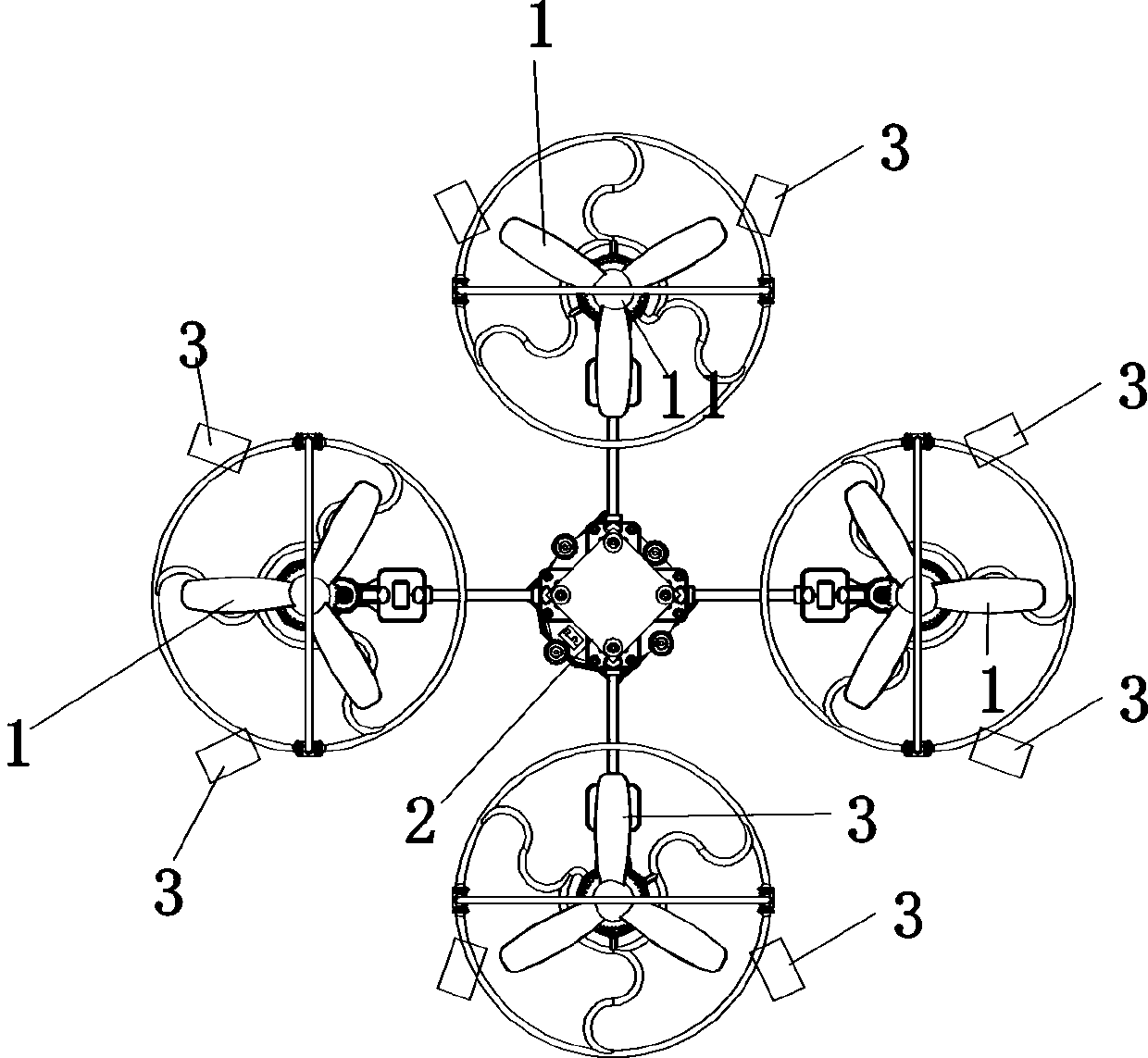
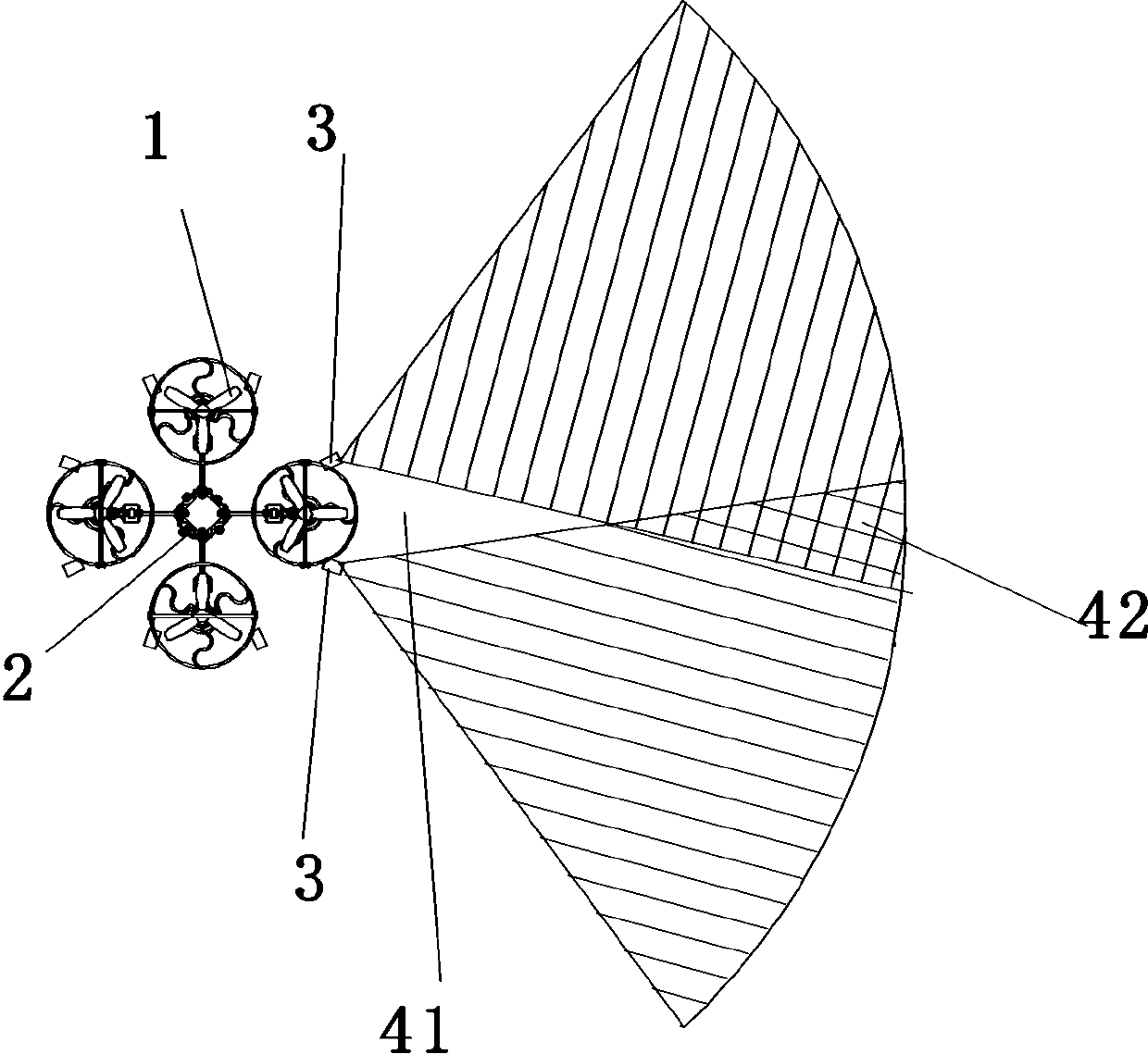
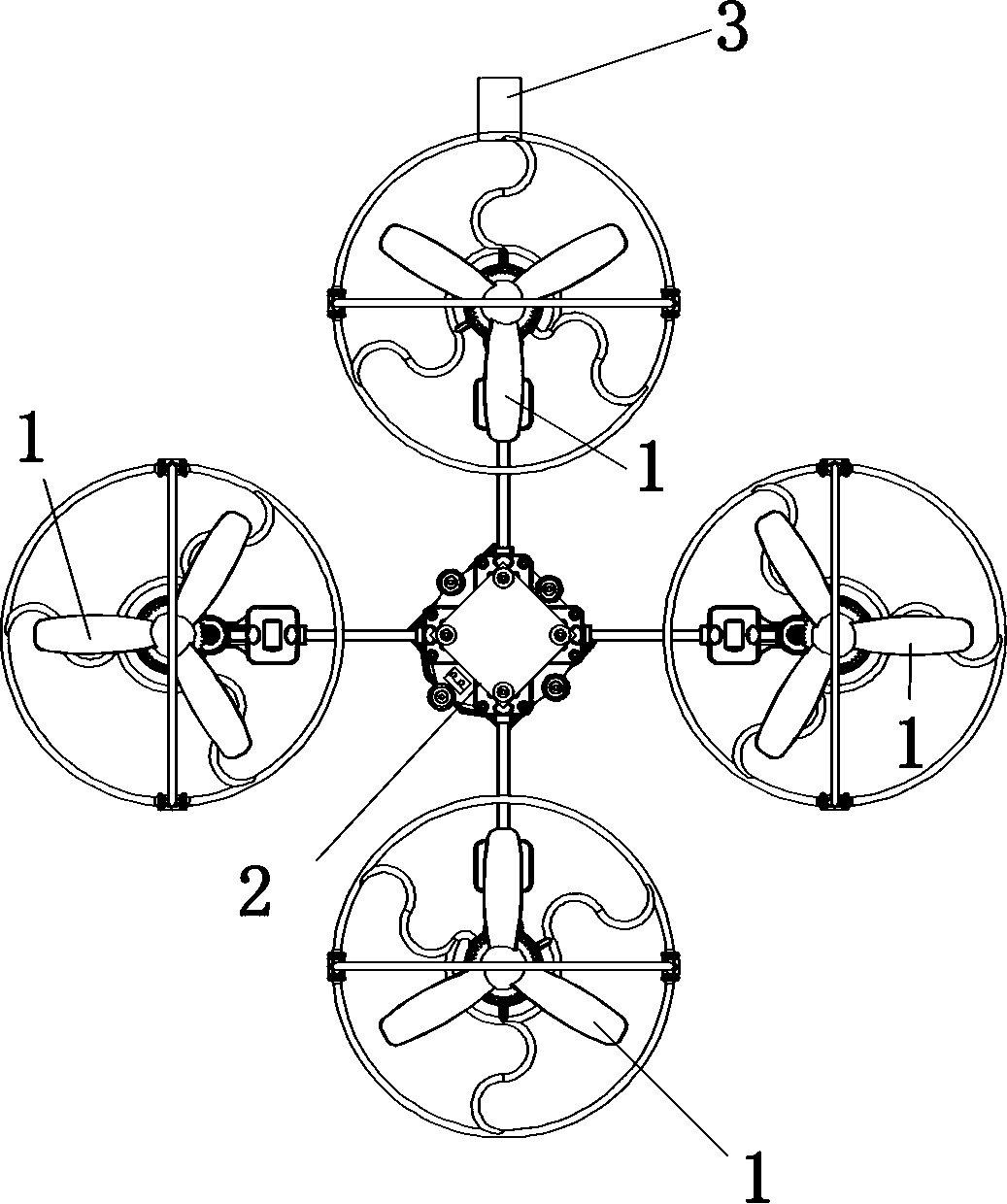
[0029] A four-axis aircraft toy that automatically retreats includes a frame 2 on which four rotor units are installed, each rotor unit includes a rotor 1 and a motor that drives the rotor to rotate; a central controller is also provided, and the central controller Control the motor speed of each rotor unit to realize the vertical movement, horizontal rotation movement, and horizontal translation movement of the quadcopter toy. The direction parameter value of the horizontal translation movement is based on the aircraft direction reference system, and the central controller is determined based on the aircraft direction reference system. The direction parameter value of the horizontal translation motion controls the direction of the horizontal translation motion according to the direction parameter value; a horizontal range finder 3 is also installed on the frame 2, and the installation direction of the horizontal range finder 3 faces away from the central area of the frame 2; ...
Embodiment 2
[0036] A flight control method of an automatically retreating four-axis aircraft toy, which adopts the automatic retreating four-axis aircraft toy of Embodiment 1; when the four-axis aircraft toy enters the automatic retreat mode, the central controller controls the four-axis aircraft toy to continue Angular velocity ω (the specific value of this embodiment is 0.5π / s, and it takes four seconds to rotate one circle) horizontal rotation movement, and in the process of horizontal rotation movement, the horizontal rangefinder continuously detects the horizontal distance between it and the object in front, And the detected horizontal distance value is sent to the central controller, and the central controller compares the detected horizontal distance value with the set horizontal distance threshold m (the specific value of this embodiment is 0.3 meters); when the horizontal distance When the instrument detects that the horizontal distance obtained is less than the set horizontal dis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com