Hexapod robot for fruit and vegetable picking and operating method thereof
A hexapod robot and working method technology, applied in the field of fruit and vegetable picking hexapod robots, can solve the problems of limited application of wheeled robots and crawler robots, severe body shaking, and poor maneuverability, so as to increase picking accuracy, The effect of strong practical value and good flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] Below in conjunction with accompanying drawing, the present invention will be further described:
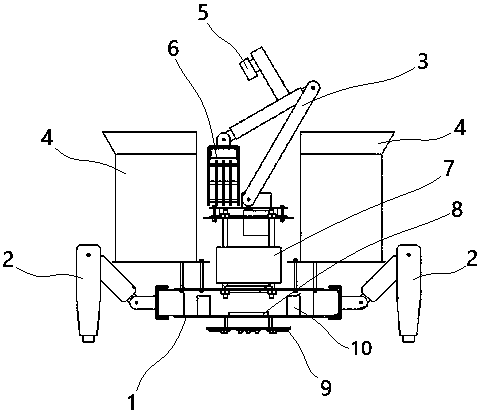
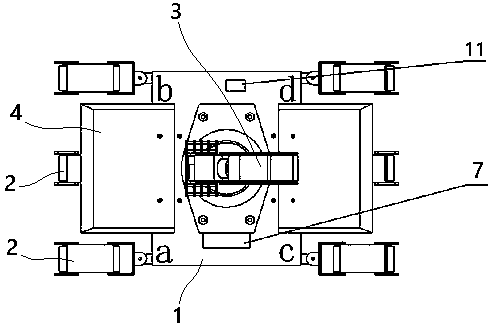
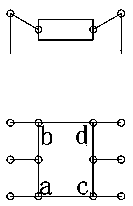
[0040] Figure 1 to Figure 8 It shows a specific embodiment of a fruit and vegetable picking hexapod robot and its working method of the present invention. figure 1 It is the front view of the fruit and vegetable picking hexapod robot in this embodiment; figure 2 It is a top view of the fruit and vegetable picking hexapod robot in this embodiment; image 3 It is a schematic diagram of the walking posture I of the fruit and vegetable picking hexapod robot in this embodiment; Figure 4 It is a schematic diagram of the walking posture II of the fruit and vegetable picking hexapod robot in this embodiment; Figure 5 It is a top view of the tracking sensor arrangement board in this embodiment; Image 6 It is a schematic diagram of the experimental site of the hexapod robot for fruit and vegetable picking in this embodiment; Figure 7 It is a schematic diagram of the walki...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com