An area denial method for navigation and links of civilian low-slow and small unmanned aerial vehicles
A UAV, low-slow and small technology, applied in the directions of interference to communications, vehicle wireless communication services, and location-based services, etc., can solve the problems of short detection distance, landing, and high false alarm rate.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the accompanying drawings.
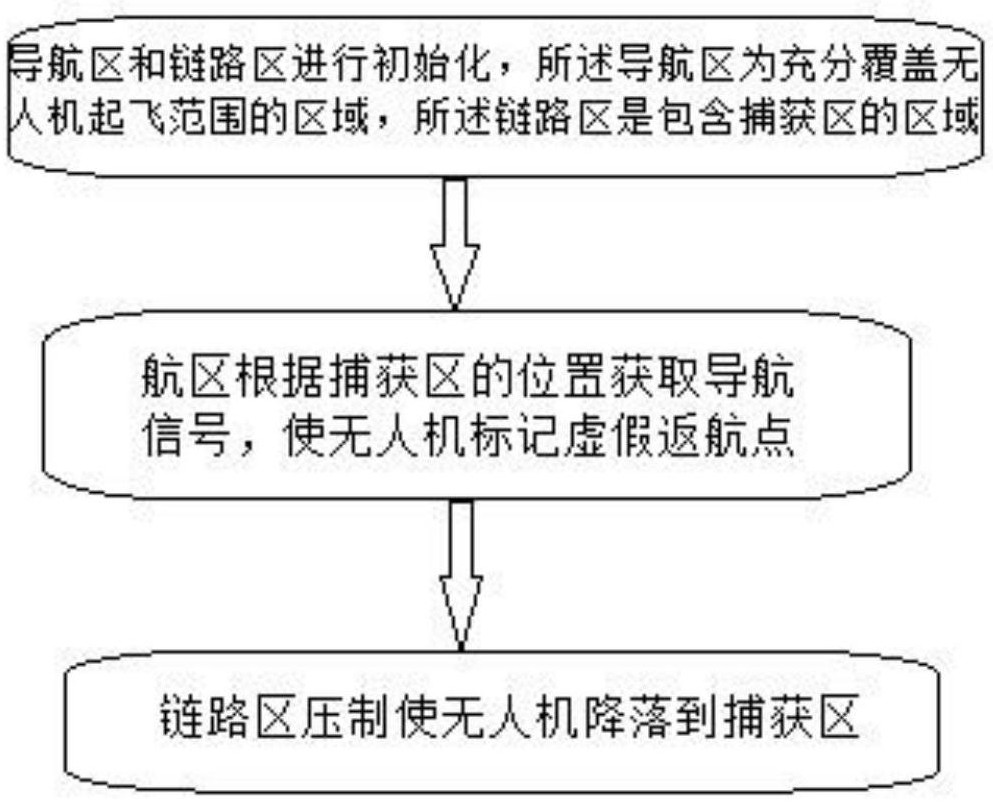
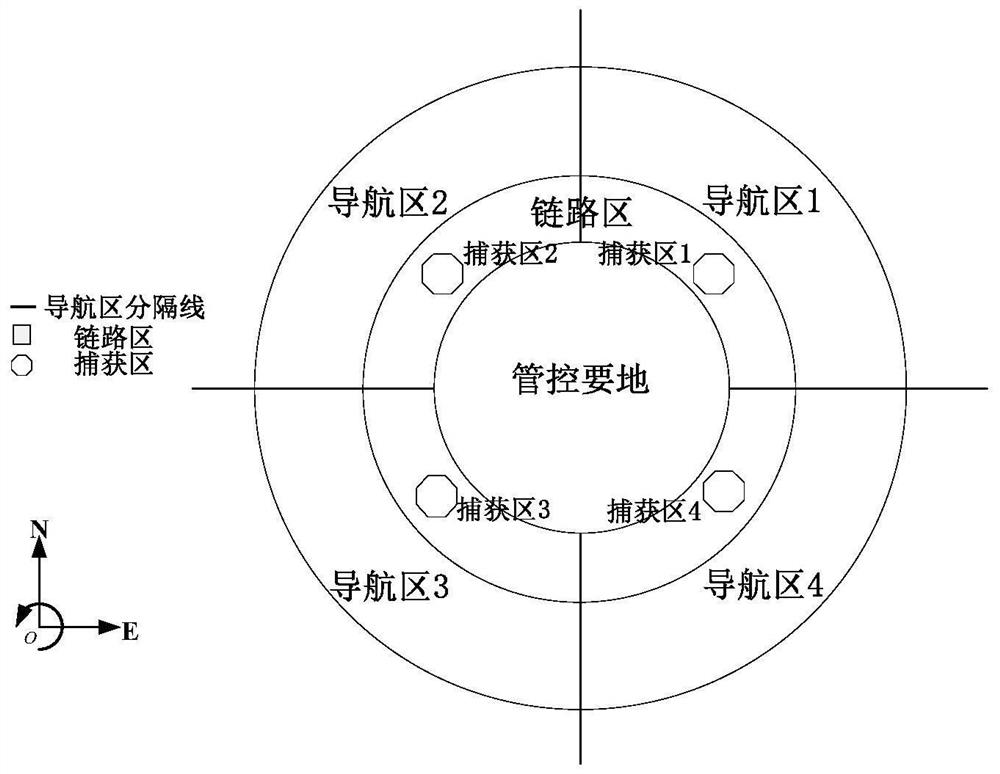
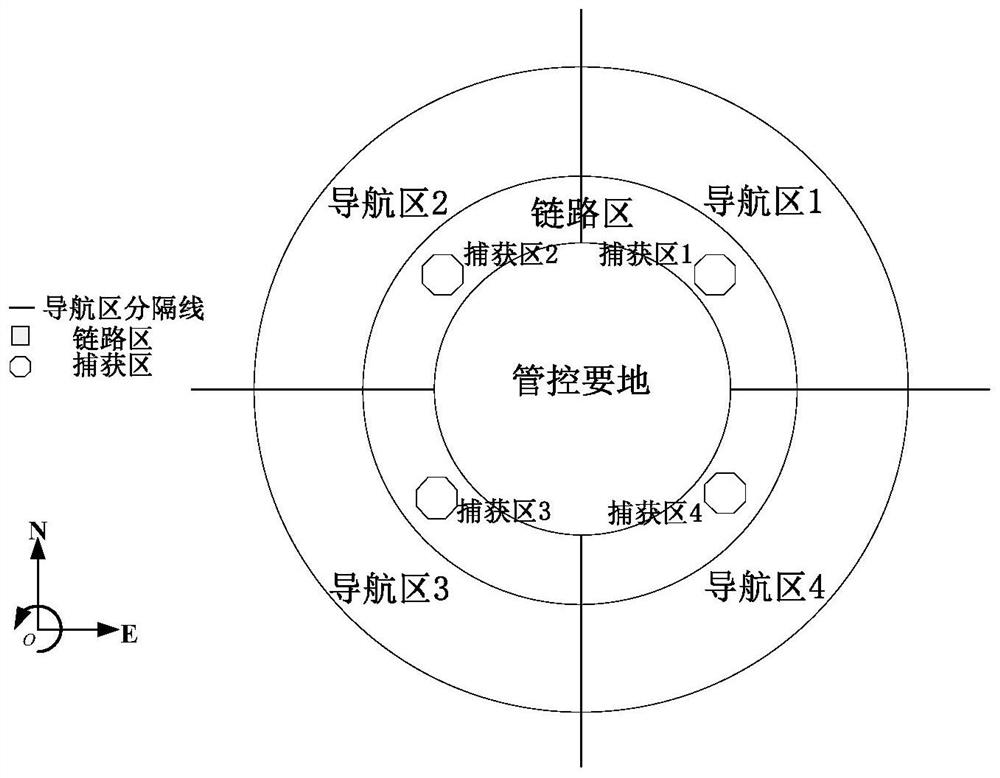
[0020] Such as figure 1 As shown in , a flow diagram of an area denial method for the navigation and link of civilian low-slow small unmanned aerial vehicles, as shown in figure 2 As shown, the scope of the system is divided into the following areas according to the functions: navigation area, link area, capture area and important control areas.
[0021] Capture area: The capture area is the designated area to capture the drone, and at the same time, the navigation signal corresponding to the navigation area should be generated according to the latitude and longitude coordinates of the capture area. In this embodiment, there is one capture area (capture area 1, capture area 2, capture area 3, capture area 4) in the four quadrants of coordinates.
[0022] Navigation area: as shown in the figure, the entire ring area is divided into 4 navigation areas (navigation area...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com