Binocular vision odometer based on direct method and linear feature and measurement method
A measurement method, binocular vision technology, applied in the direction of measuring device, measuring distance, surveying and navigation, etc., can solve the problem of not being able to track well, and achieve the problem of scale uncertainty, good robustness, and not easy to lose Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
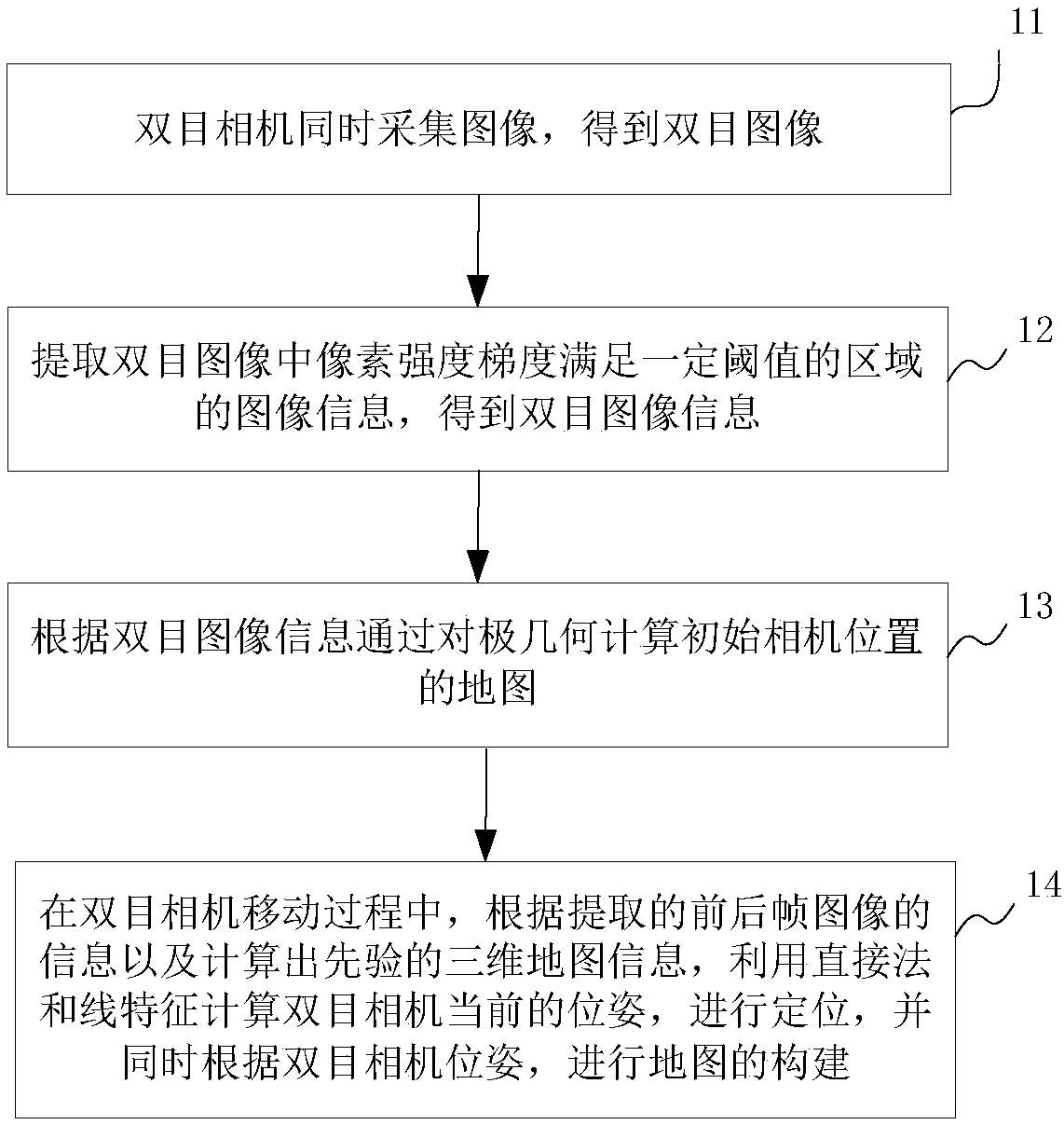
[0029] This embodiment provides a binocular visual odometer measurement method based on direct method and line feature. Such as figure 1 As shown, the measurement method includes the following steps.
[0030] Step 11. The binocular camera collects images simultaneously to obtain a binocular image.
[0031] The left and right eyes of the binocular camera of the binocular visual odometer simultaneously collect images in real time. The left and right binoculars of the binocular camera can be cameras set left and right.
[0032] Step 12, extracting the image information of the region where the pixel intensity gradient in the binocular image meets a certain threshold, and obtaining the binocular image information;
[0033] In an example, the threshold includes a first threshold; extracting image information of an area where the pixel intensity gradient in the binocular image meets a certain threshold, and obtaining the binocular image information includes: extracting the pixel i...
Embodiment 2
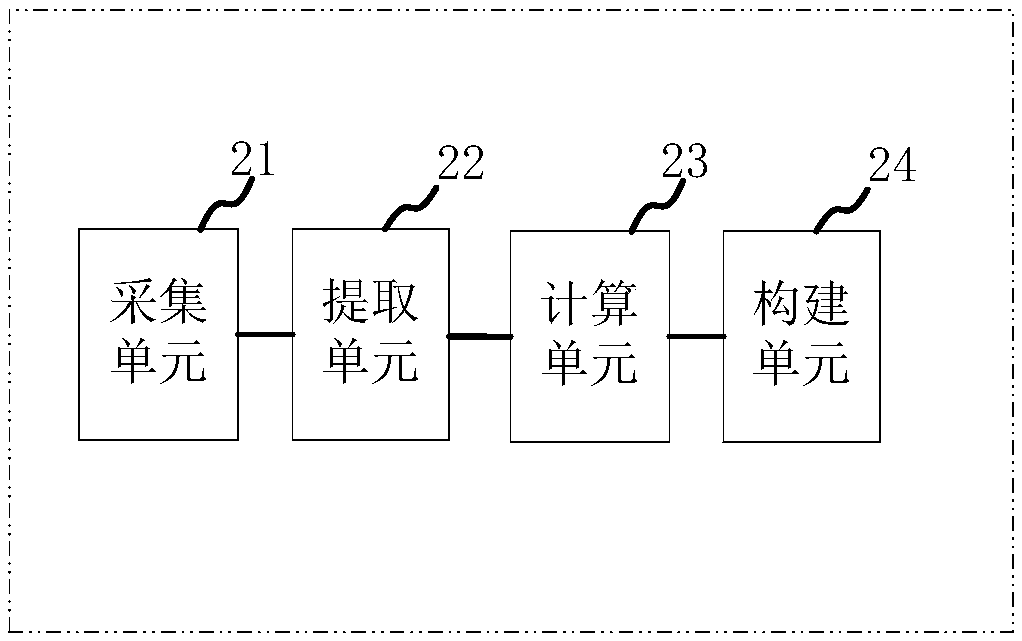
[0051] This embodiment provides a binocular visual odometer based on direct methods and line features. Such as figure 2 As shown, the binocular visual odometer includes:
[0052] The acquisition unit 21 is used for simultaneously acquiring images by binocular cameras to obtain binocular images;
[0053] The extraction unit 22 is used to extract the image information of the region where the pixel intensity gradient in the binocular image meets a certain threshold, and obtain the binocular image information;
[0054] Calculation unit 23, for calculating the map of the initial camera position through epipolar geometry according to binocular image information;
[0055] The construction unit 24 is used to calculate the current pose of the binocular camera by using the direct method and line features according to the information of the extracted front and rear frame images and the calculated prior three-dimensional map information during the movement of the binocular camera, and ...
Embodiment 3
[0058] The present embodiment provides a kind of binocular visual odometer based on direct method and line feature, described binocular visual odometer comprises: processor 31, memory 32; Described memory 32 stores code; Described processor 31 executes all Said code is used to implement the measuring method described in embodiment 1.
[0059] The binocular visual odometer based on the direct method and line features provided in this embodiment has the following advantages: it can provide calculation accuracy, and when large-scale movement and rotation occur, it can be tracked well and is not easy to be lost; in an environment with less texture It also has good robustness; and solves the scale uncertainty problem of monocular visual odometry; also reduces the initialization process of monocular visual odometry; and can make image matching more robust.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com