Grabbing mechanism without driving source and grabbing method
A grasping mechanism and driving source technology, applied in the field of manipulators, can solve problems such as energy consumption, achieve the effect of good guidance and avoid energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described in detail below in conjunction with specific embodiments, which are for explanation rather than limitation of the present invention.
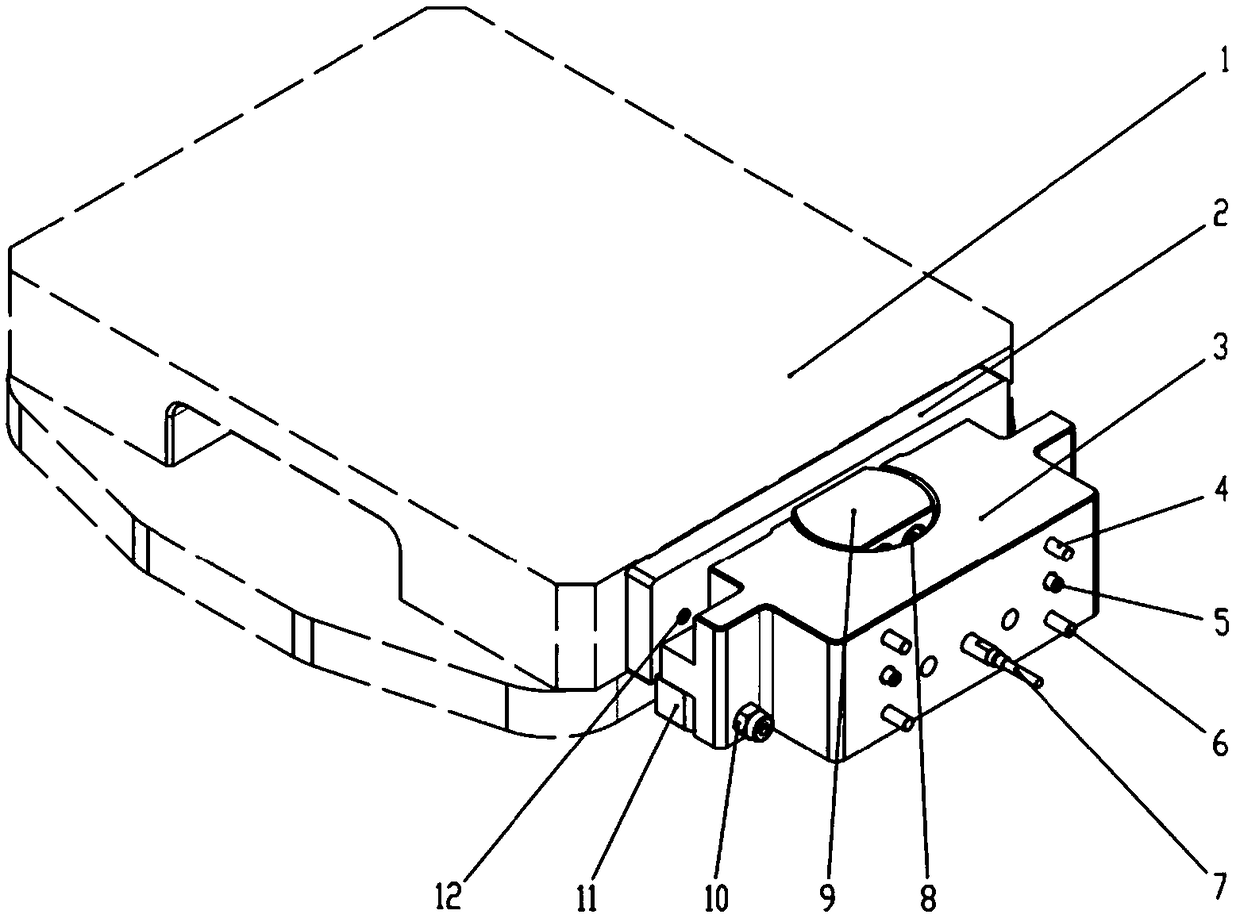
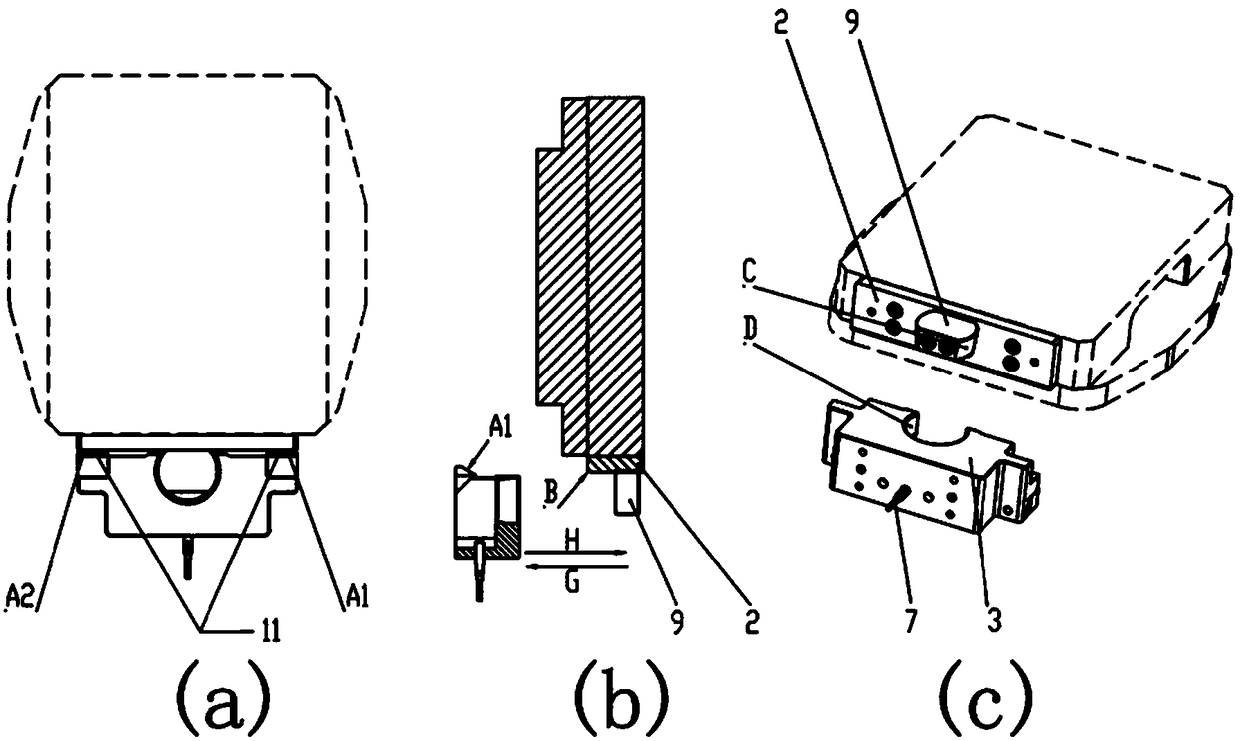
[0034] Such as figure 1 with 2 As shown, the grasping mechanism of the present invention is mainly divided into two parts: one part is the hook grasping block assembly installed on the part to be grasped, and the other part is the hook base assembly installed on the manipulator. The piece to be grabbed is the load. The pallet grabbing device of the present invention includes: a mounting plate 2, a hook base 3, a screw 4, a positioning pin 5, a screw 6, a photoelectric sensor 7, a first screw 8, a hook grab block 9, and a lock nut 10 and hook claw positioning block 11. The piece to be grasped can be a workpiece or a quick-change tray 1, and the present invention takes the quick-change tray 1 as an example for description.
[0035] The hook grabbing block 9 is fixed on one side of the mounting b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com