Needle holding clamp for minimally invasive surgery under gastrointestinal endoscope
A technology for minimally invasive surgery and digestive endoscopy, applied in the field of needle-holding forceps, can solve the problems of limited space for the forceps channel, limited surgical instruments, and difficult to achieve suture techniques, and achieves the effects of convenient control and free opening and closing.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
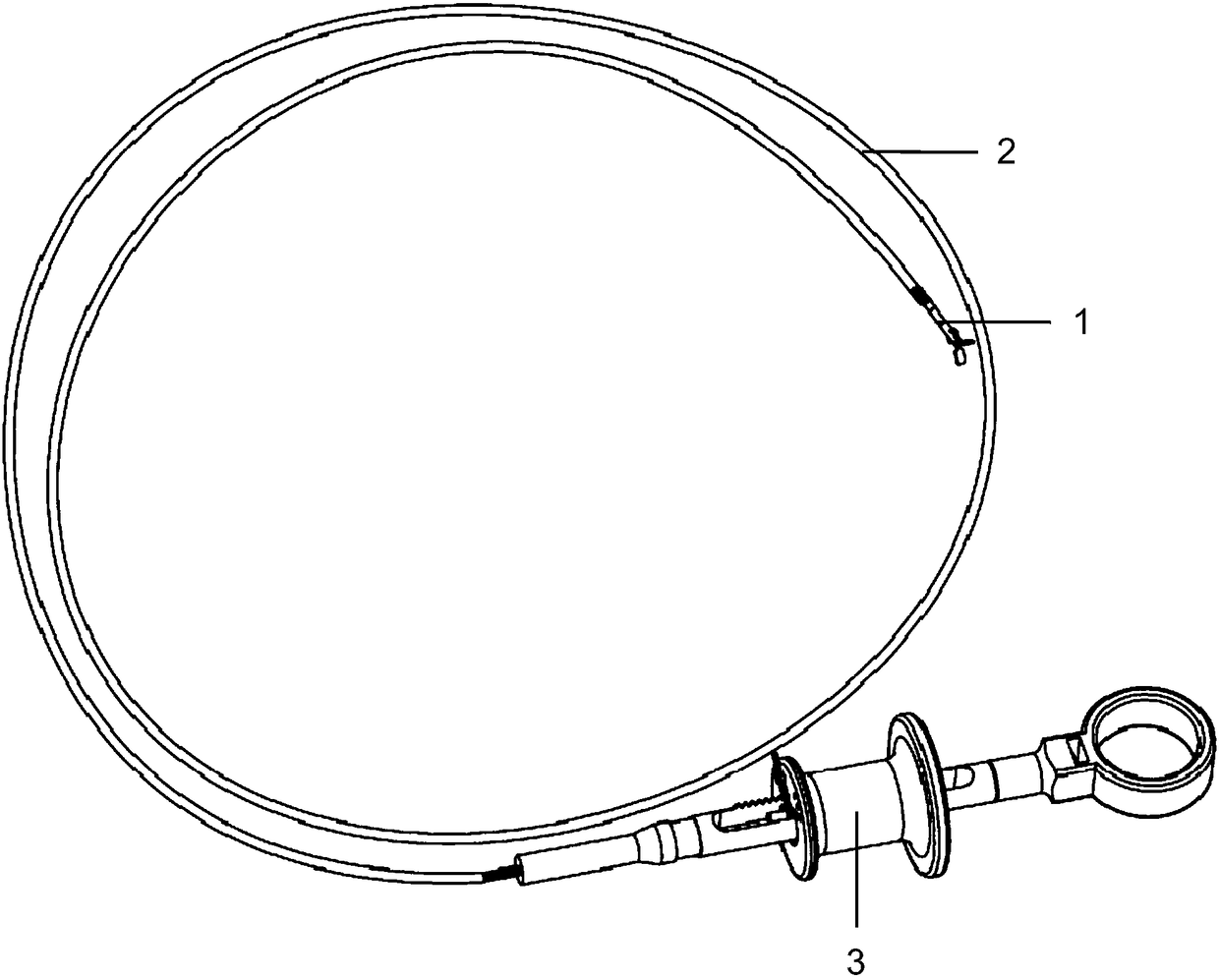
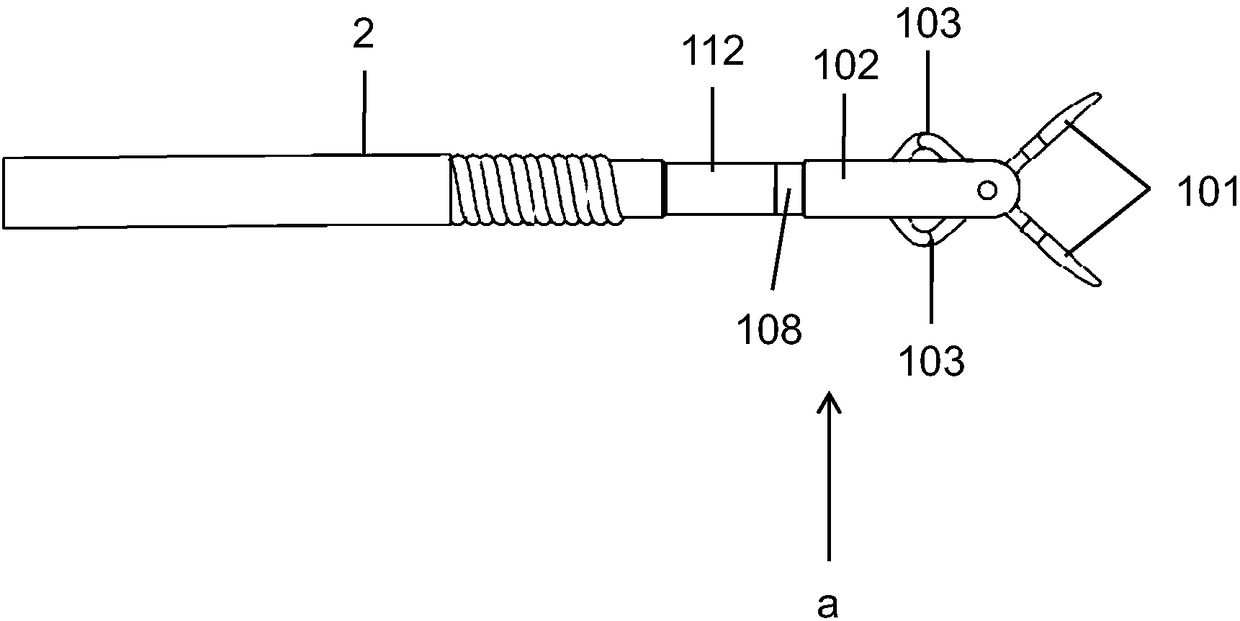
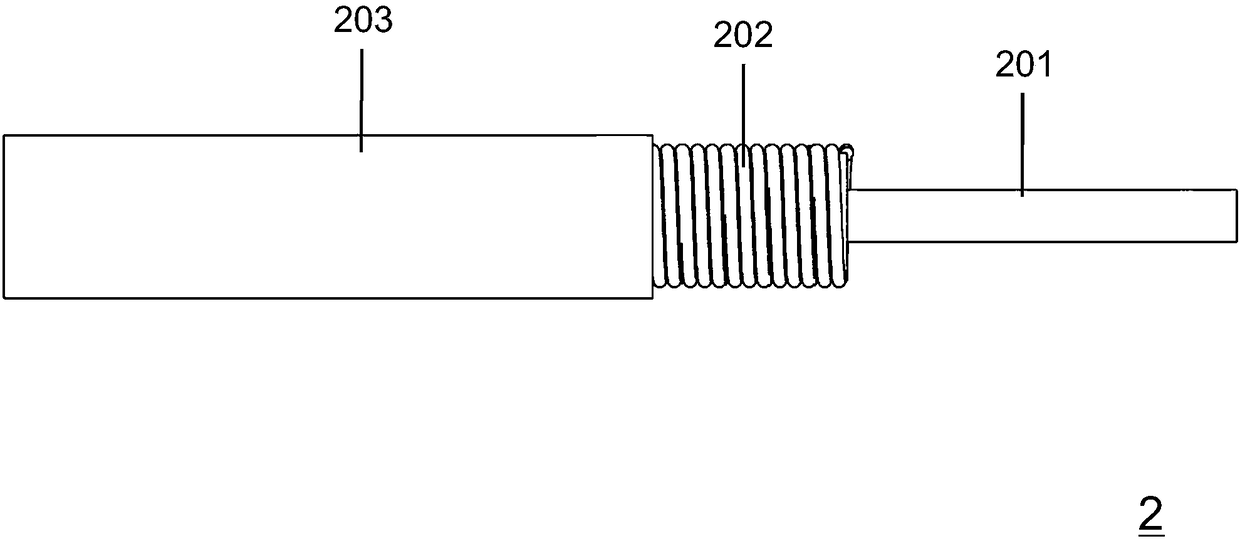
[0037] Please combine Figure 1 to Figure 9 As shown, a needle-holding forceps for minimally invasive surgery under digestive endoscopy provided by the present invention includes a forceps head 1, a forceps body 2 and a control handle 3, and the rear end of the forceps head 1 is connected with one end of the forceps body 2 , the other end of the clamp body 2 is connected to the front end of the control handle 3, and the control handle 3 controls the clamp head 1 to clamp and release the suture needle and suture through the clamp body 2. In this embodiment, the control handle 3 has a total length of 165mm, and the clamp body 2 total length 1600mm, pliers head 1 total length is about 13mm, is arranged like this to be convenient for the needle-holding forceps of the present invention to insert endoscopic forceps channel and carry...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com