A method for calibrating a catadioptric camera using properties of a single sphere and a conjugate diameter
A conjugate diameter, refraction technology, applied in the field of computer vision, can solve the problem of complex ring point selection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
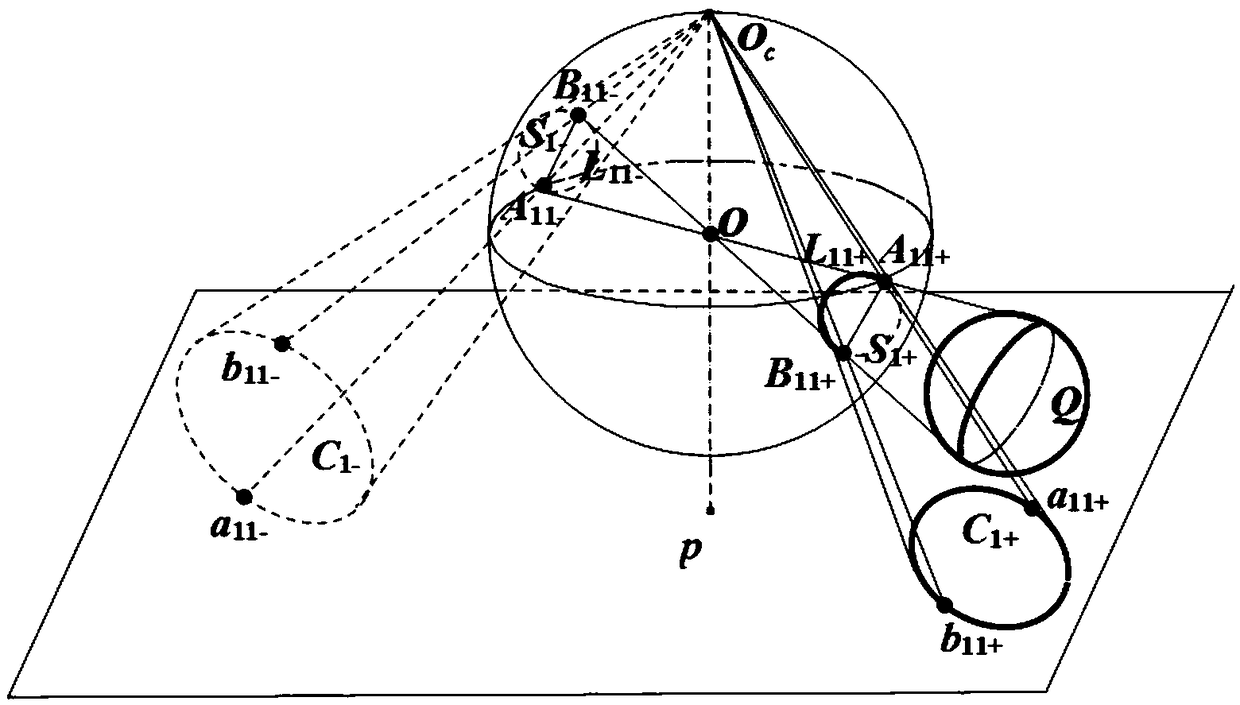
[0060] The invention proposes a method for linearly determining the parameters of a parabolic reflex camera by using a sphere in space as a target. The schematic diagram of the experimental template structure used in the present invention is as figure 1 Shown. The following describes the implementation of the present invention in more detail with an example.
[0061] The experimental template used in the calibration of the parabolic catadioptric camera based on the ball in space is a ball in space, such as figure 1 As shown, the ball is Q. Using the method of the present invention to calibrate the parabolic catadioptric camera used in the experiment, the specific steps are as follows:
[0062] 1. Fit the image boundary and target curve equation
[0063] The image size used in the present invention is 1300×1200. Use the parabolic catadioptric camera to shoot 3 experimental images of the target, read in the images, use the Edge function in Matlab to extract the pixel coordinates o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com