Method and system for constructing AGV indoor map based on laser radar
A technology of lidar and indoor map, which is applied in the field of AGV navigation to achieve the effect of improving map construction efficiency, improving operation flexibility, and reducing the amount of computation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
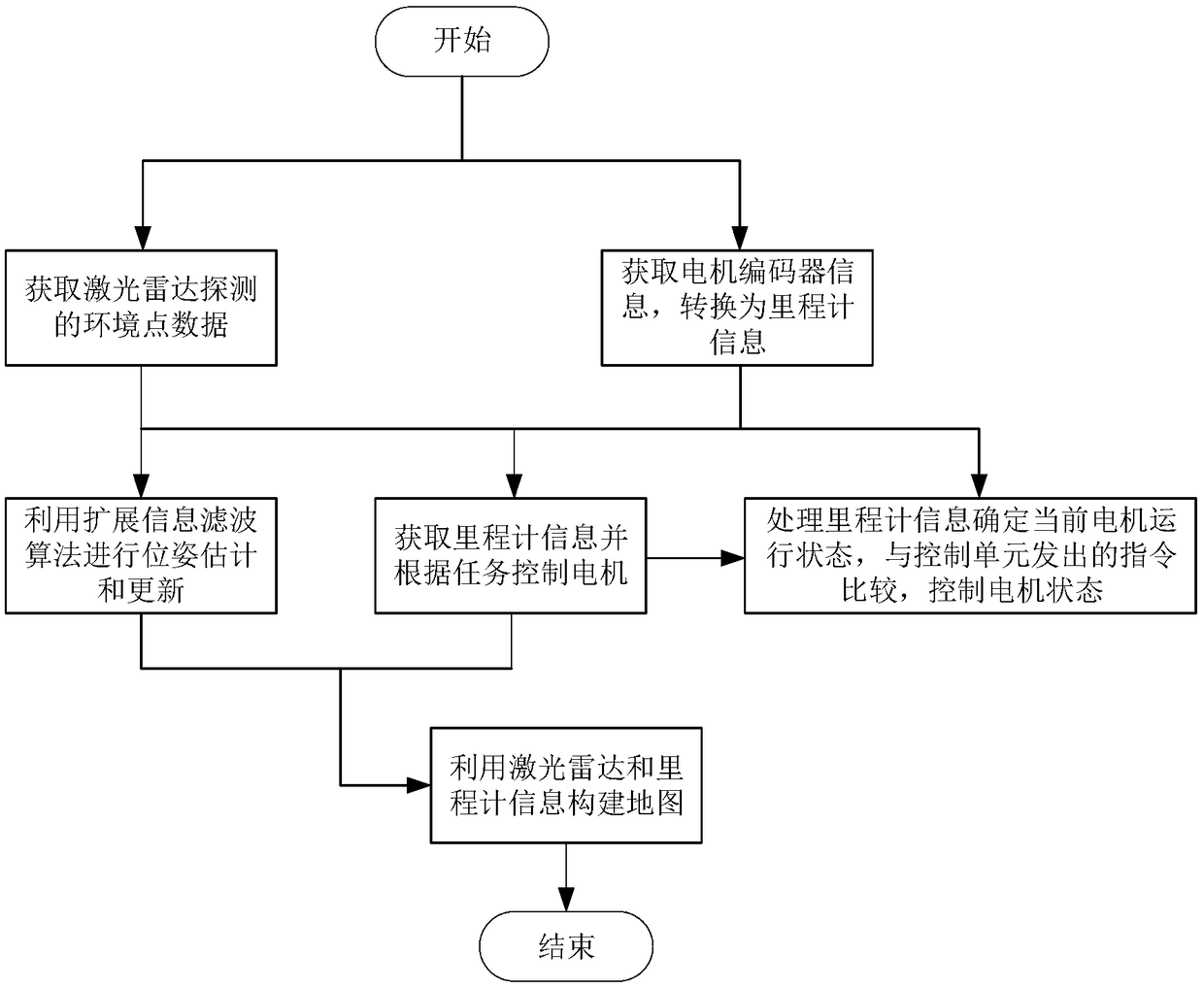
[0037] This patent introduces lidar sensors and odometers into the extended information filtering algorithm for multi-sensor information fusion to realize AGV map construction. Among them, the extended information filter (EIF) is the dual form of the extended Kalman filter (EKF), which uses the information matrix to represent the correlation of two features, and the off-diagonal elements of the correlation between the two features in the information matrix are in the form of Exponential decay. Therefore, the calculation efficiency is greatly improved under the premise of ensuring the positioning accuracy.
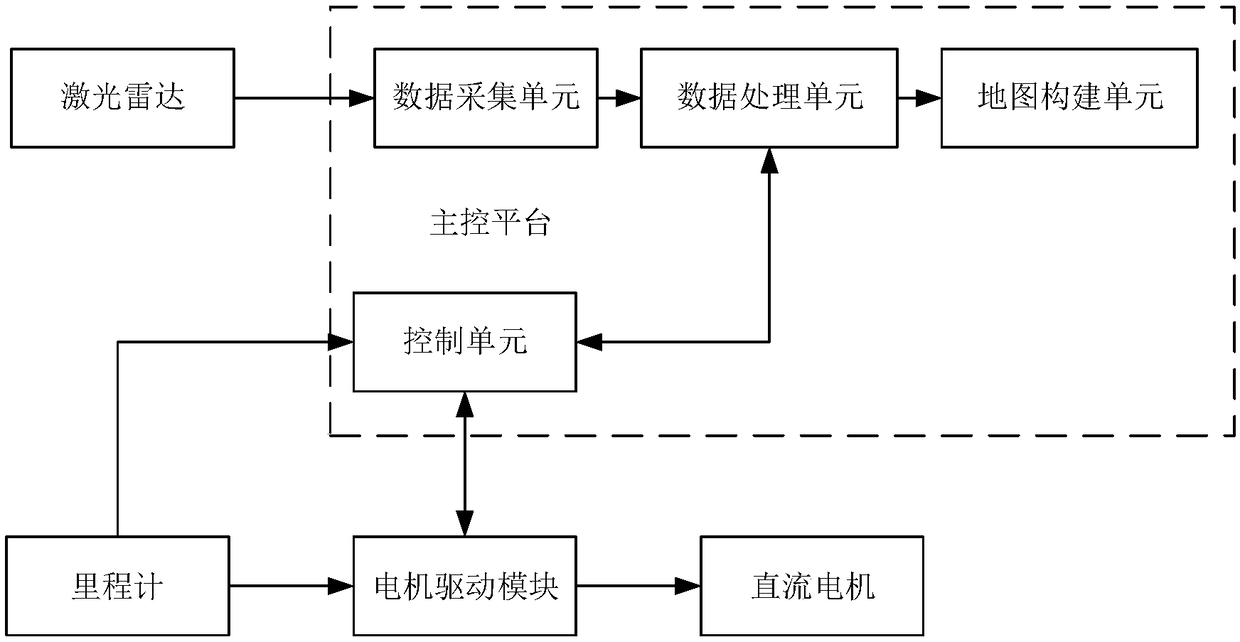
[0038] like figure 1 As shown, the present embodiment is an AGV indoor map construction system based on lidar, including a data acquisition part, a control part and a map construction part, wherein the data acquisition part includes a laser radar, an odometer and a data acquisition unit, and the control part includes a DC motor , a motor drive module and a control unit, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com