Accurate landing method and system for vehicle-mounted unmanned aerial vehicle
A vehicle-mounted unmanned aerial vehicle and unmanned aerial vehicle technology, applied in control/adjustment system, vehicle position/route/height control, instrument, etc., can solve the problem of high power supply system requirements, high power consumption of electromagnetic signals, tracking and positioning interference, etc. problem, to achieve the effect of reducing the influence of electromagnetic signal interference, low hardware resource requirements, and expanding the spatial range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
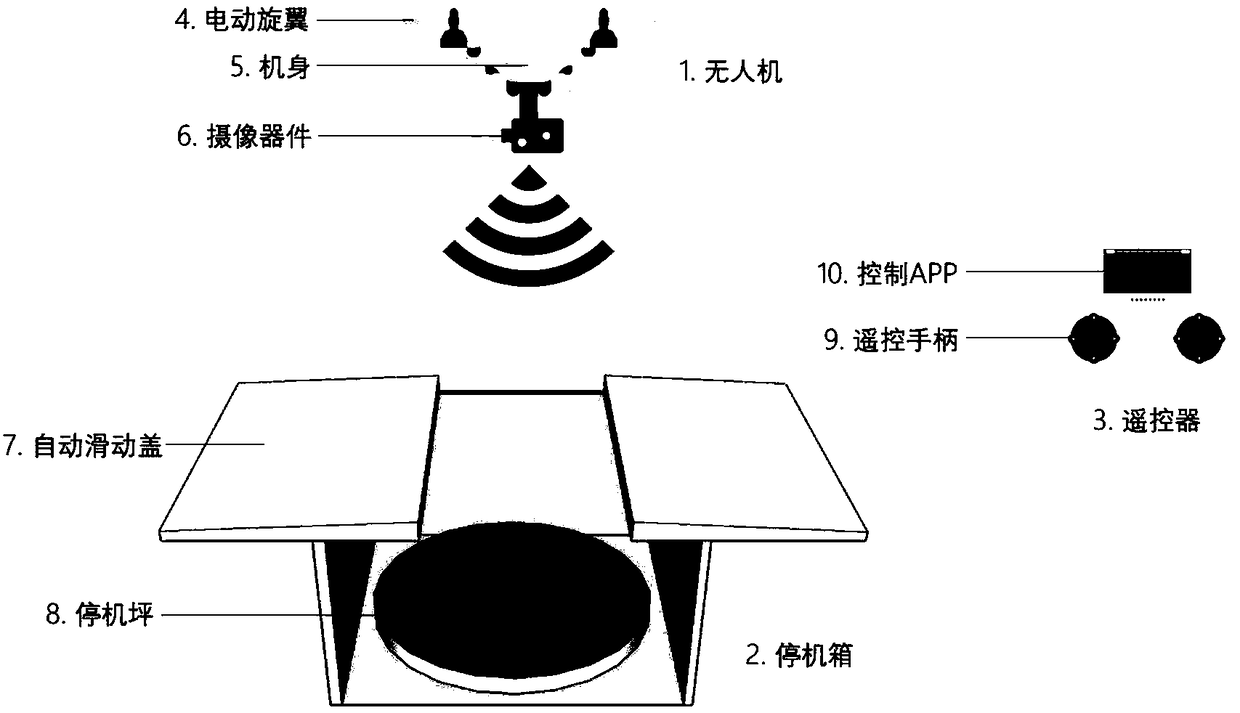
[0048] This embodiment discloses a method for precise landing of a vehicle-mounted UAV, which is applied to a UAV control system. The system includes a UAV 1, a remote control terminal 2 and a parking box 3, such as figure 1 shown.
[0049] An unmanned aerial vehicle 1 includes an electric rotor 4, a fuselage 5, a camera 6 and a flight controller. The camera device is located at the bottom of the fuselage, and is connected to the flight controller through a signal, and the flight controller can transmit photos and video information to the remote control terminal in real time;
[0050]The remote control terminal 2 includes the remote control handle 9 and the UAV flight state control APP10, which controls the flight state and camera function of the UAV, and the sliding cover 7 on the top of the parking box 3 is opened and closed.
[0051] Parking box 3 equipment is positioned at car roof or behind the car, comprises shell, and described shell top is provided with the automatic ...
Embodiment 2
[0084] The purpose of this embodiment is to provide a vehicle-mounted UAV precision landing system.
[0085] A vehicle-mounted unmanned aerial vehicle precision landing system, comprising: unmanned aerial vehicle, remote control terminal and vehicle-mounted apron box with positioning marks on the apron;
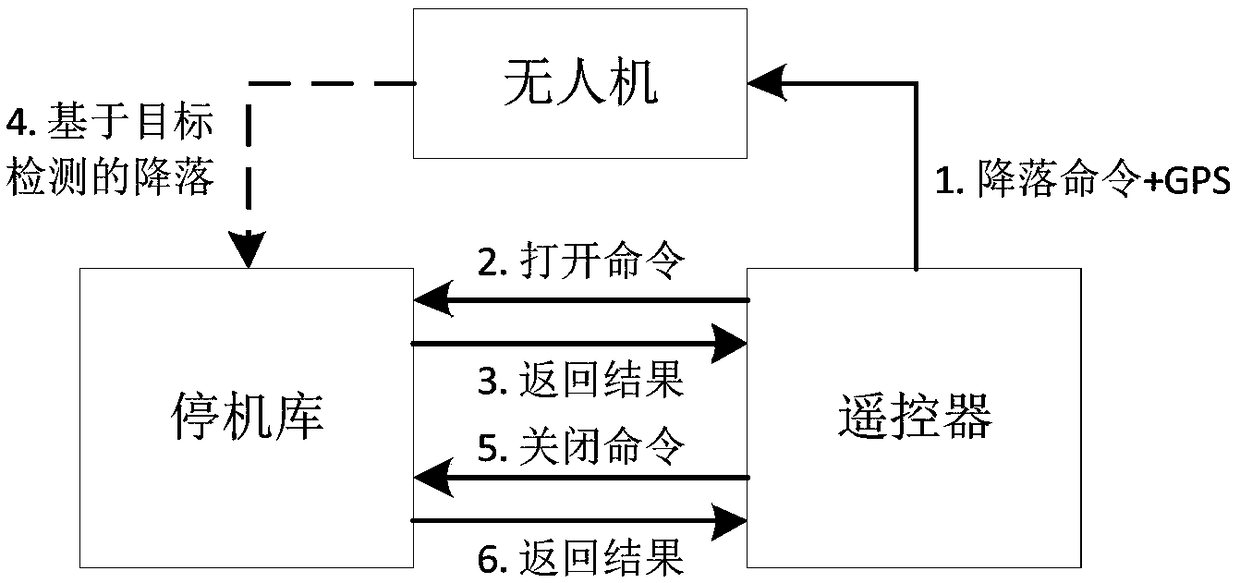
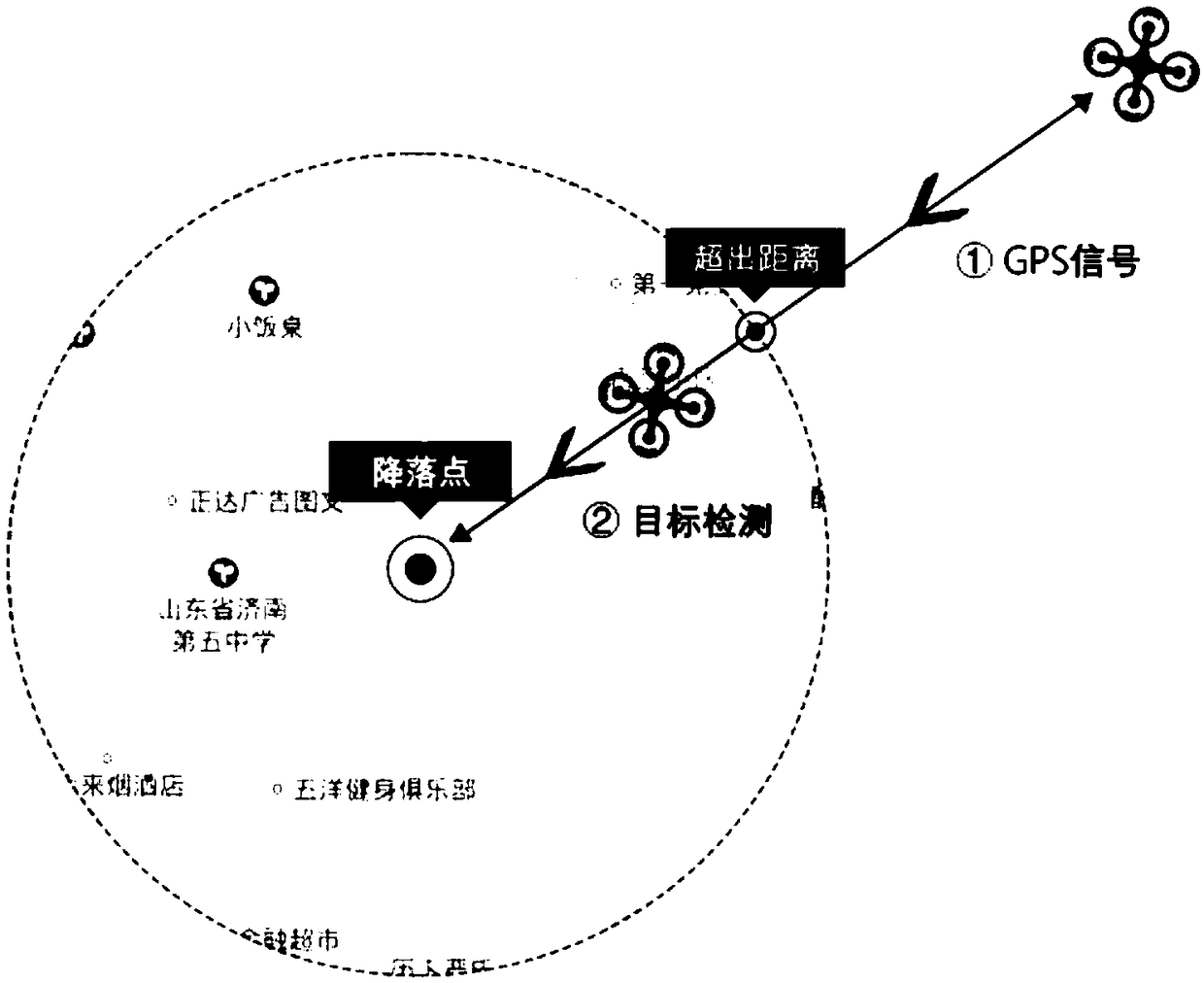
[0086] The remote control terminal receives the return command input by the user and sends it to the UAV flight controller, and at the same time sends the current position information of the vehicle; receives the image data sent by the UAV, recognizes the positioning mark on the image, and generates Control commands and send them to the UAV flight controller;
[0087] The unmanned aerial vehicle includes a camera and a flight controller. The flight controller receives the return instruction and the current position information of the vehicle, controls the unmanned aerial vehicle to fly within a certain range of the position, and controls the camera to capture image data inclu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com