Multifunctional multi-legged robot control system
A multi-legged robot and control system technology, applied in the field of multi-functional multi-legged robot control system, can solve problems affecting normal operation and lower overall efficiency, and achieve the effects of convenient replacement and maintenance, simple wiring, and good synchronization performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] Embodiments of the present invention will be described in detail below. It should be emphasized that the following description is only exemplary and not intended to limit the scope of the invention and its application.
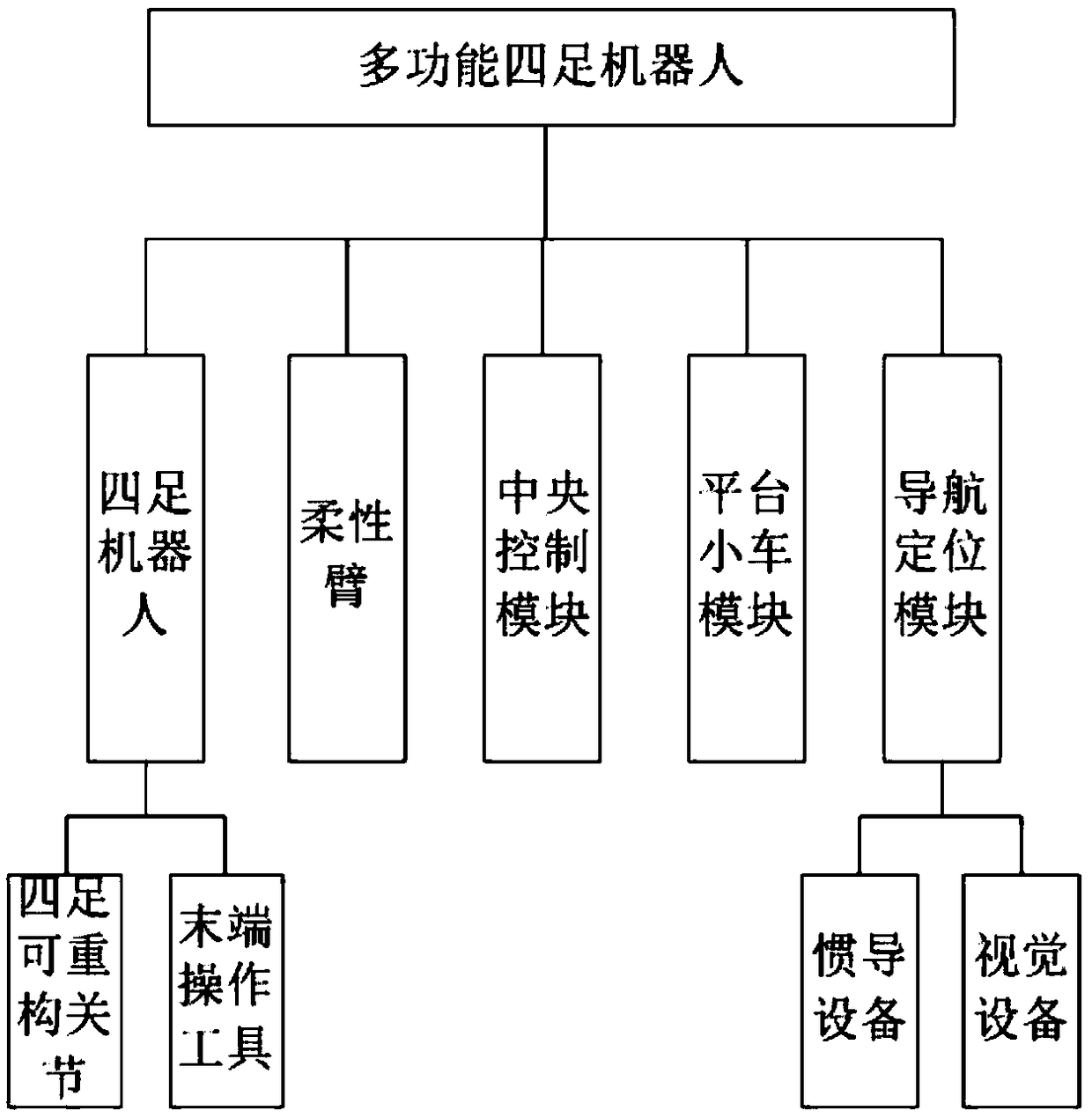
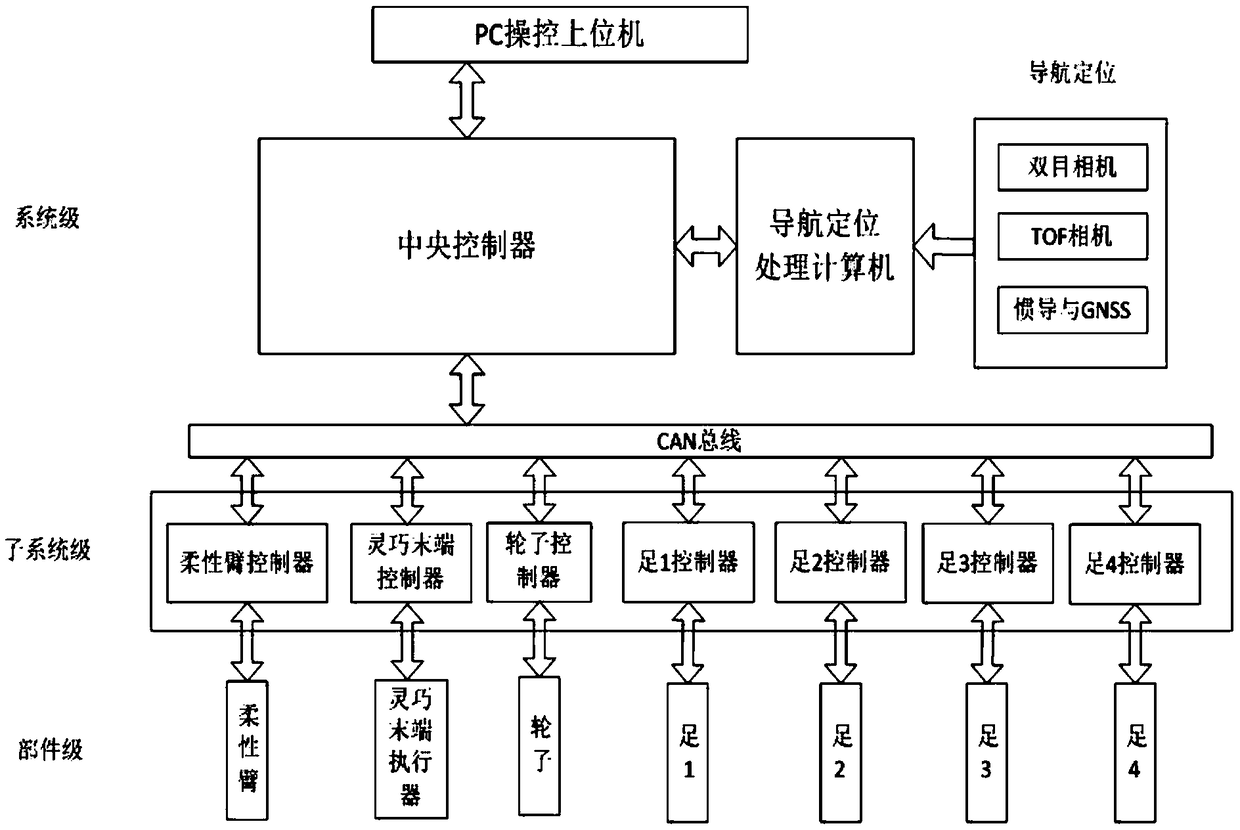
[0042] refer to figure 1 , in one embodiment, a multi-functional multi-legged robot control system is a distributed multi-level control system, including system level, subsystem level and component level, the system level includes a central controller, and the central control The device is used for task planning and control of the entire system, receiving task instructions from the PC to control the upper computer, decomposing the instructions, and planning and outputting instructions for each control module at the subsystem level. instructions from the central controller, and distribute the instructions to the component-level joint controllers through preset trajectory planning and control algorithms to control each single foot, and upload the status ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com