Method and system for extracting parking space of underground garage in high-precision map making
An underground garage and extraction method technology, which is applied in the field of high-precision map production, can solve the problems of error, light sensitivity, and large gradient difference of parking spaces, and achieves the effect of satisfying production accuracy requirements, improving robustness, and improving inclination angle.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
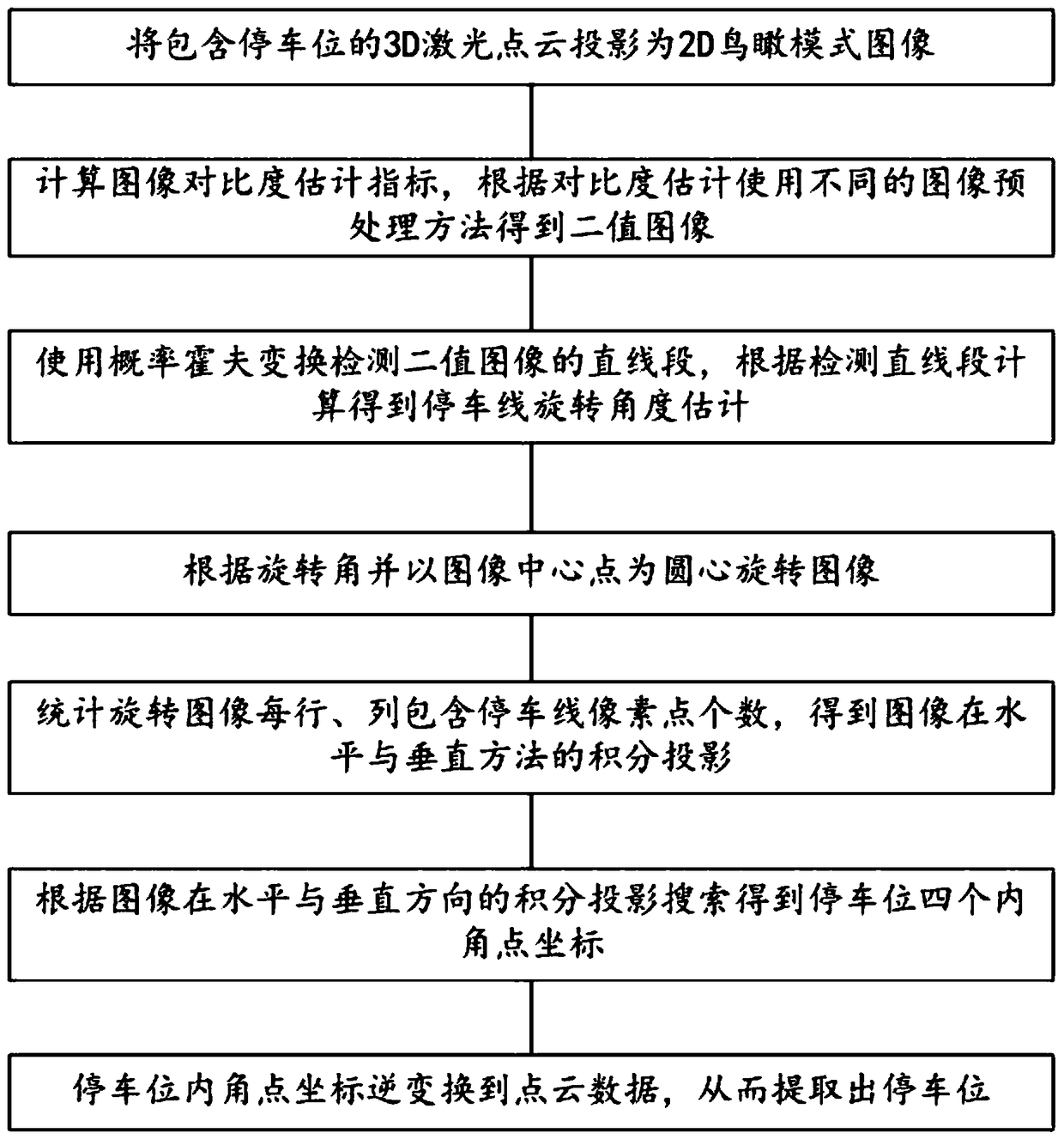
[0043] Such as figure 1 , one A method for extracting a parking space in an underground garage in high-precision map production, comprising the steps of:
[0044] S1, projecting the 3D laser point cloud containing the parking space into a 2D bird's-eye view image;
[0045] S2. Calculate the image contrast estimation index, and use different image preprocessing methods to obtain a binary image according to the contrast estimation;
[0046] S3, using the probability Hough transform to detect the straight line segment of the binary image, and calculating the rotation angle estimation of the parking line according to the detected straight line segment;
[0047] S4. Rotate the image according to the rotation angle and take the center point of the image as the center;
[0048] S5, count the number of pixels of the parking line in each row and column of the rotated image, and obtain the integral projection of the image in the horizontal and vertical methods;
[0049] S6. Accordi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com