Method for calculating electronic differential speed of electric vehicle
A technology of electronic differential speed and calculation method, which is applied in the direction of electric vehicles, electrical devices, control drives, etc., to achieve the effect of flexible driving and driving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
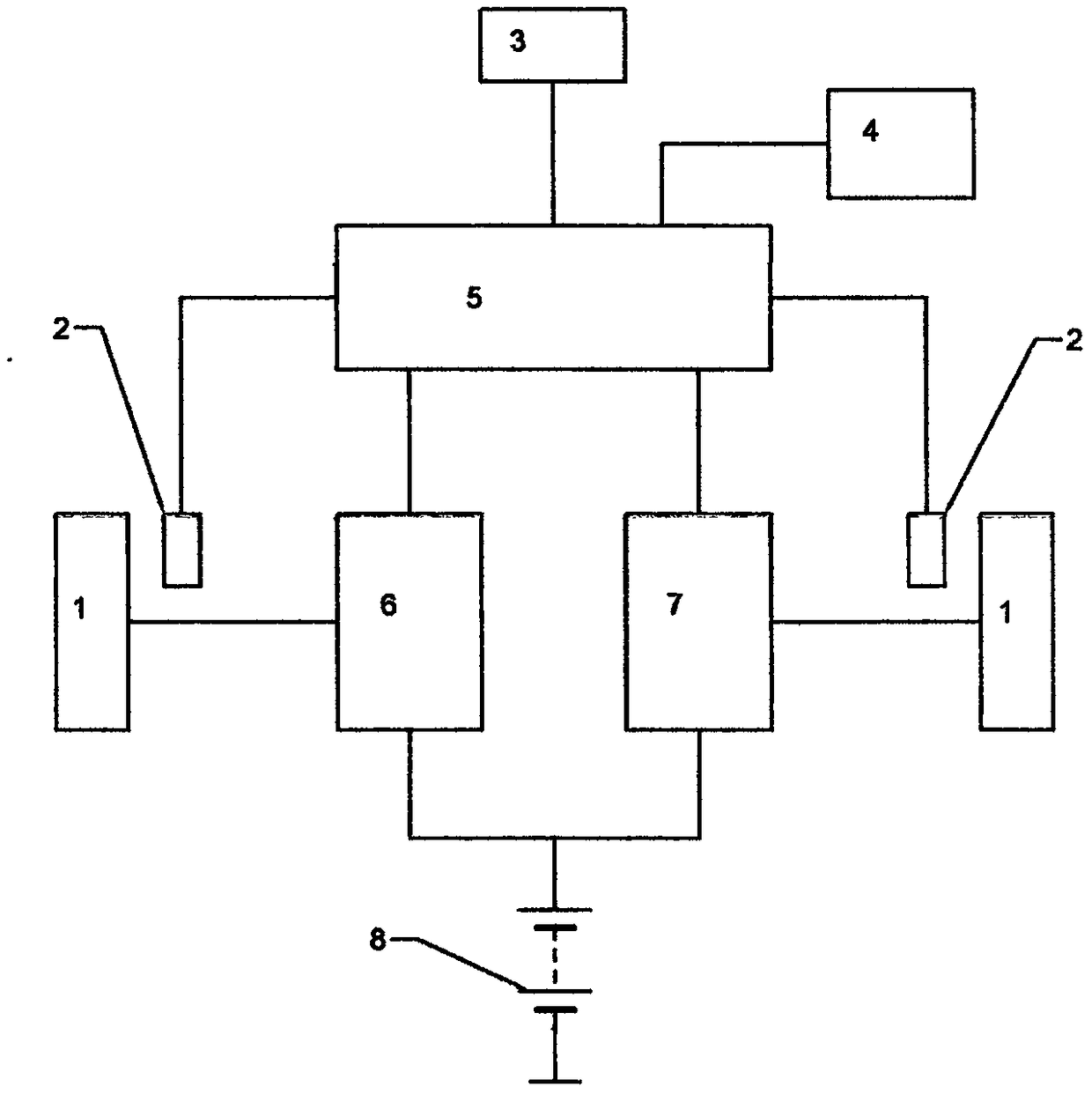
[0012] exist figure 1 Among them, when the electric vehicle is running straight, the left and right corners of the steering angle sensor 3 are 0, outputting a straight-going signal, and the ECU computer 5 outputs a 1:1 acceleration sensor 4 signal to both the left controller 6 and the right controller 7, and the controller controls the battery pack 8 Output the same drive rotation speed current signal to the left and right wheel drive motors 1 to control the left and right wheel drive motors 1 to run at the same speed.
[0013] When the electric vehicle turns left, the steering angle sensor 3 outputs the same signal as the steering angle to the ECU computer 5, and the ECU computer 5 transmits the acceleration sensor 4 signal 1:1 to the right controller 7 to drive the right wheel motor to run; the ECU computer 5 According to the angle signal of turning left, the signal of the acceleration sensor 4 is calculated at a ratio of 1: (0.6-1), and sent to the left controller 6 to driv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com