Garbage cleaning method and device, and cleaning robot
A cleaning robot and cleaning method technology, applied in the field of intelligent control, can solve the problem of cleaning the dead corner of the cleaning robot, and achieve the effect of solving the cleaning dead corner and avoiding the cleaning dead corner.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0030] According to an embodiment of the present invention, an embodiment of a garbage cleaning method is provided. It should be noted that the steps shown in the flow chart of the accompanying drawings can be executed in a computer system such as a set of computer-executable instructions, and, Although a logical order is shown in the flowcharts, in some cases the steps shown or described may be performed in an order different from that shown or described herein.
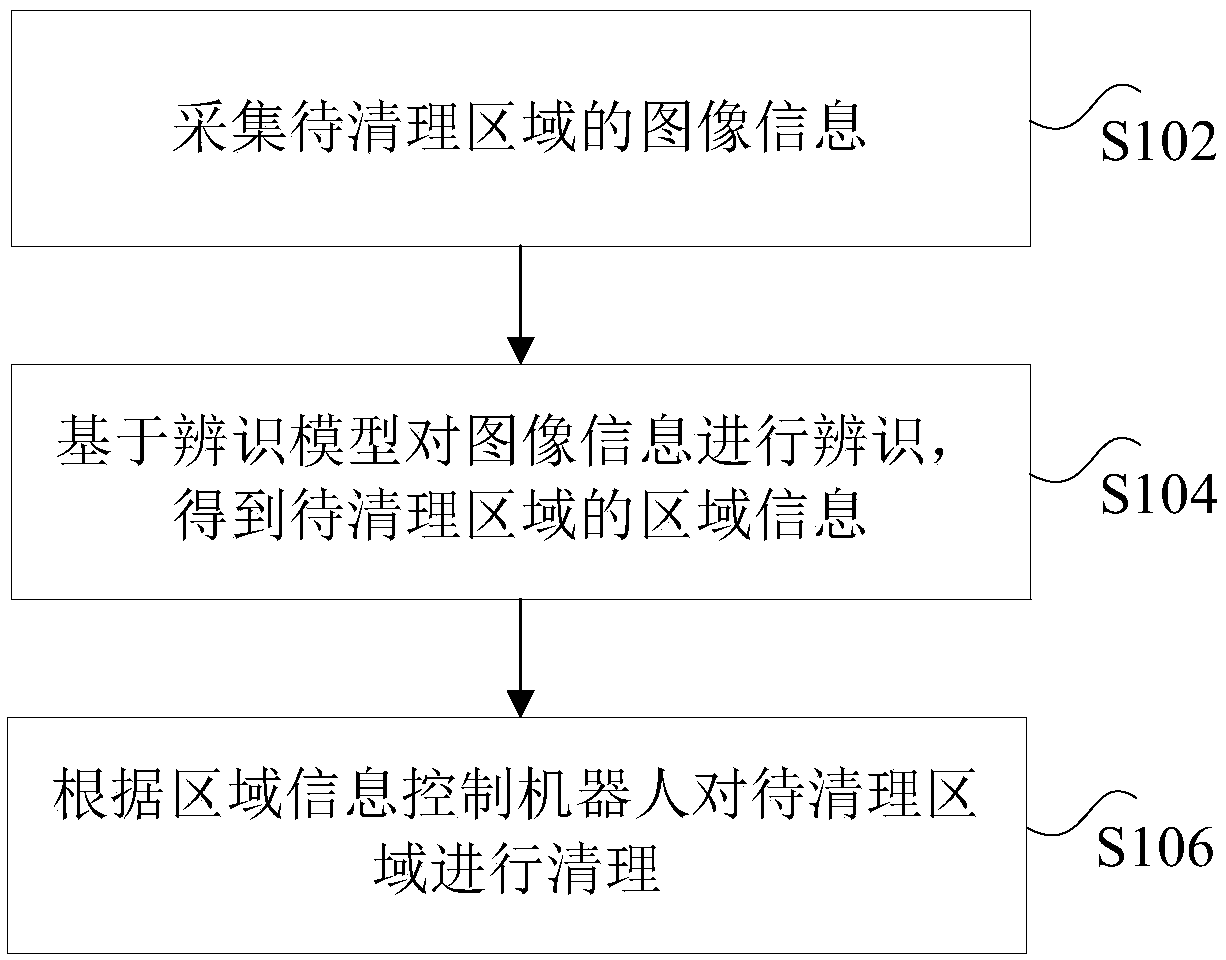
[0031] figure 1 It is a flowchart of a garbage cleaning method according to an embodiment of the present invention, such as figure 1 As shown, the method includes the following steps:
[0032] Step S102, collecting image information of the area to be cleaned.
[0033] It should be noted that the area to be cleaned can be an area not blocked by an object (for example, on the ground), or an area covered by an object, for example, an area covered by a bed or a sofa, such as under a bed or under a sofa. In addition, ...
Embodiment 2
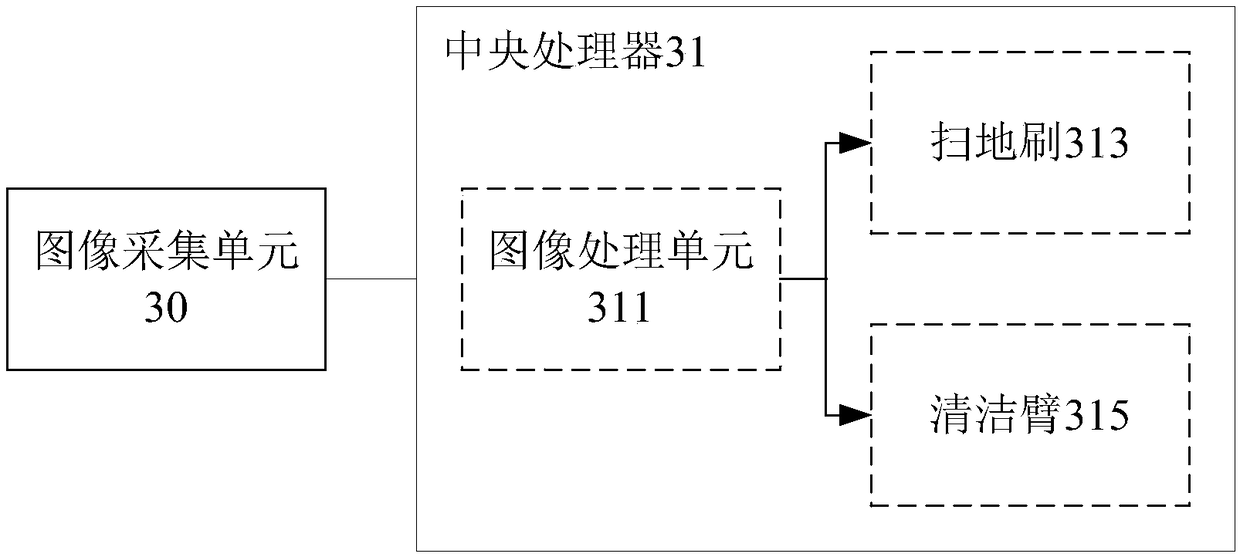
[0056] According to an embodiment of the present invention, an embodiment of a cleaning robot is also provided, and the cleaning robot can implement the garbage cleaning method provided in Embodiment 1. in, image 3 is a structural schematic diagram of a cleaning robot according to an embodiment of the present invention, such as image 3 As shown, the cleaning robot may include: an image acquisition unit 30 and a central processing unit 31 .
[0057] Wherein, the image acquisition unit 30 is used to collect the image information of the area to be cleaned; the central processing unit 31 includes an image processing unit 311, wherein the image processing unit is used to identify the image information based on the identification model to obtain the area of the area to be cleaned Information, and control the robot to clean the area to be cleaned according to the area information. The identification model is obtained through decision tree training using multiple sets of data. Ea...
Embodiment 3
[0069] According to an embodiment of the present invention, an embodiment of a garbage cleaning device is also provided, and the device can implement the garbage cleaning method provided in Embodiment 1. in, Figure 4 It is a schematic structural diagram of a garbage cleaning device according to an embodiment of the present invention, such as Figure 4 As shown, the device may include: a collection module 401 , an identification module 403 and a cleaning module 405 .
[0070] Among them, the acquisition module 401 is used to collect the image information of the area to be cleaned; the identification module 403 is used to identify the image information based on the identification model to obtain the area information of the area to be cleaned. Tree training, each set of data in multiple sets of data includes: image information and area information corresponding to the image information; a cleaning module 405 is used to control the robot to clean the area to be cleaned according...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com