Finite time track tracking control method for rotorcraft
A technology for rotorcraft with limited time, applied in three-dimensional position/channel control, attitude control, adaptive control and other directions, can solve the problems of limited motor-driven rotor speed, limited aircraft lift, and reduced system control performance, to ensure limited time The effect of stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0101] specific implementation plan
[0102] The implementation process of the present invention will be described in detail below in conjunction with the accompanying drawings and simulation examples.
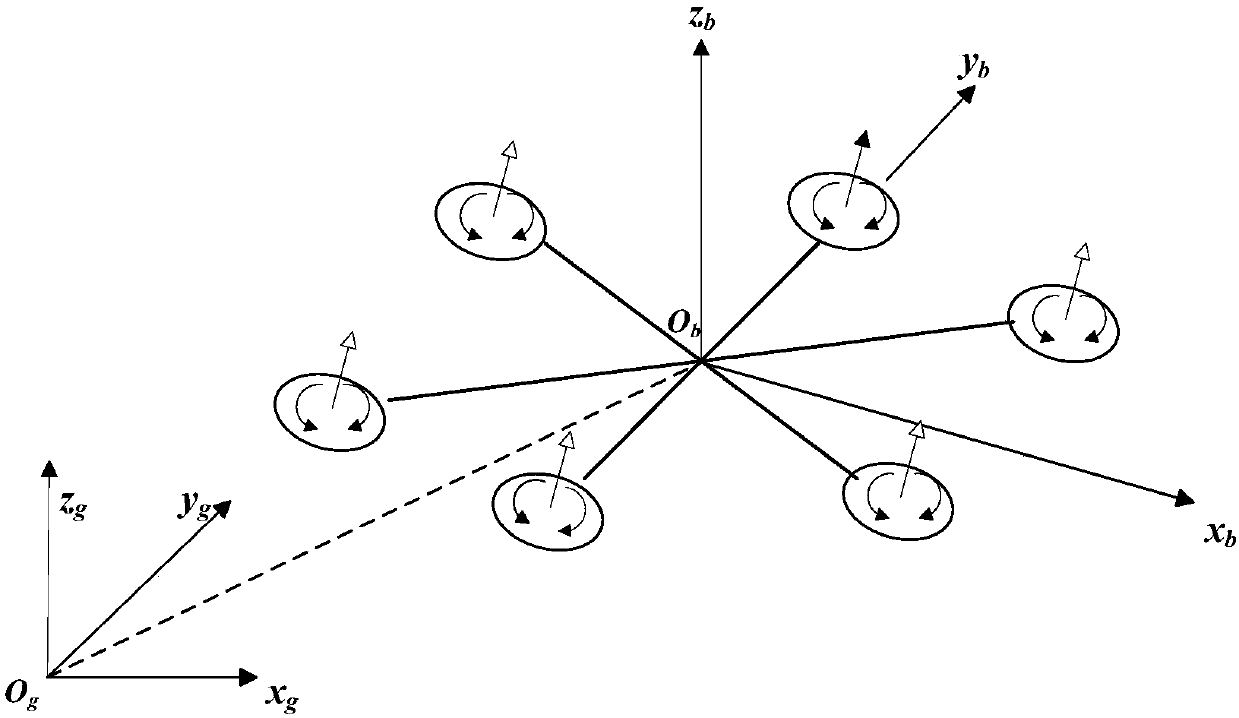
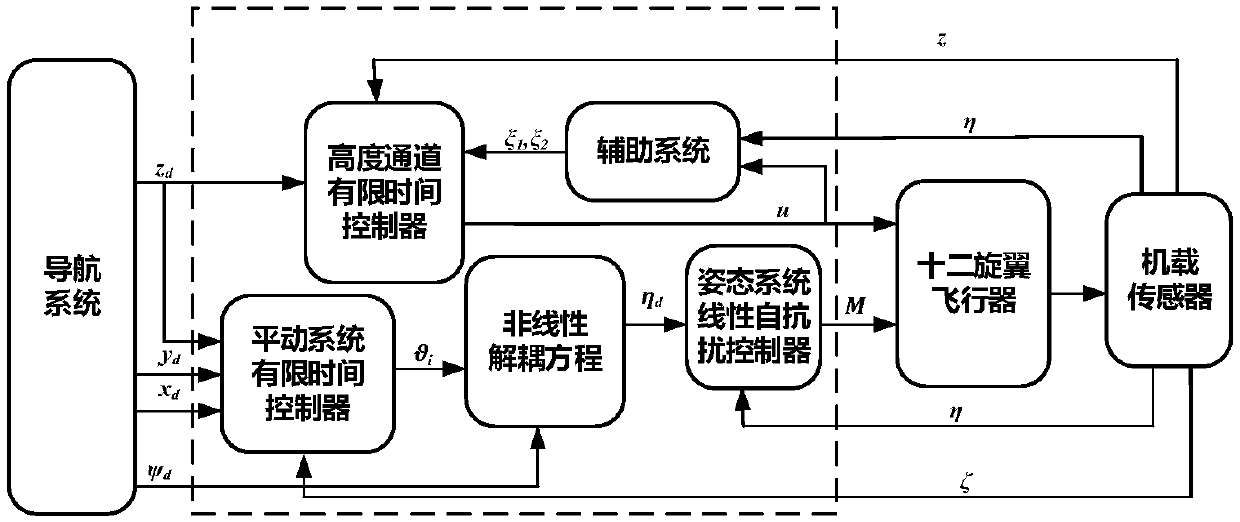
[0103] The present invention proposes a finite-time trajectory tracking control method for a rotorcraft, wherein the rotorcraft involved is shown in Figure 1, and the principle diagram of the control strategy involved is shown in Figure 1. figure 2 As shown, it mainly includes: twelve-rotor aircraft module, altitude controller module, translation controller module, nonlinear decoupling module, and attitude controller module. The function of each module is described below:
[0104] Twelve-rotor aircraft module: establish the mathematical model of the twelve-rotor aircraft through the Newton Euler equation, and describe the motion mechanism of the aircraft.
[0105] Altitude controller module: According to the collected aircraft altitude information z and the expected traject...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com