Model uncertainty mechanical arm motion control method based on multi-layer neural network
A multi-layer neural network, uncertainty technology, applied in the field of model uncertain manipulator motion control based on multi-layer neural network, can solve problems such as difficult engineering use, instability, and tracking performance deterioration, and achieve good robustness Function, good tracking effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
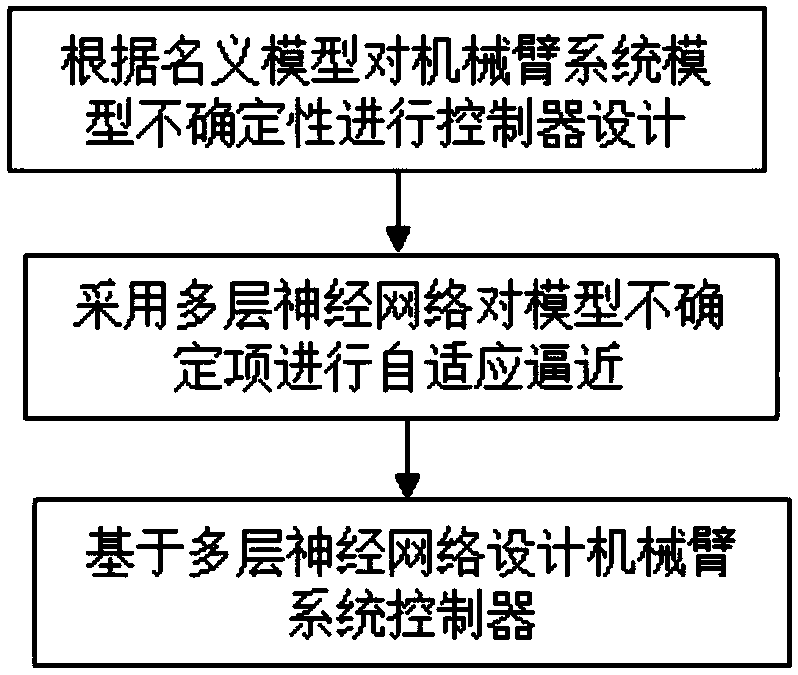
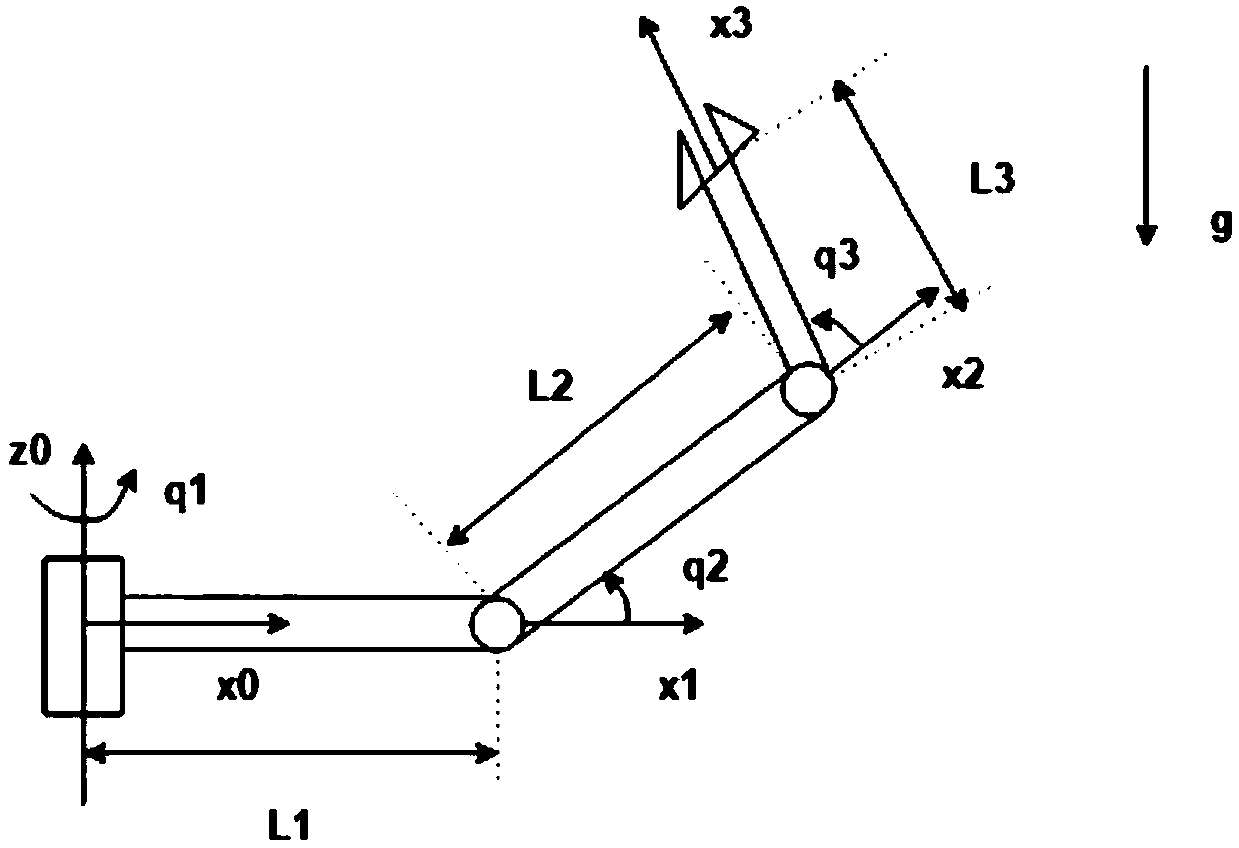
[0137] combine image 3 In this embodiment, a three-degree-of-freedom manipulator is used in series to illustrate a model uncertain manipulator system motion control method based on a multi-layer neural network. The specific steps are as follows:
[0138] Step 1. Design the controller for the uncertainty of the manipulator system model according to the nominal model
[0139] Step 1.1. Establish a dynamic model of the robotic arm system with uncertainty:
[0140] In order to realize the high-precision motion control of the robot arm, various uncertain factors must be considered comprehensively, including model uncertainty and external interference, etc. Consider the following dynamic model of the robot arm with uncertainty:
[0141]
[0142] where q=[q 1 ,q 2 ,q 3 ] T ∈ R 3 is the joint angle, D(q) is a 3×3 order positive definite inertia matrix, is a 3×3 order inertia matrix, representing the centrifugal force and Coriolis force of the manipulator, G(q)∈R 3 is the g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com