Measurement and control system of quad-rotor unmanned aerial vehicle scientific research and teaching test bench
A four-rotor UAV, measurement and control system technology, applied in the field of UAV, can solve problems such as inability to in-depth and innovative research, difficult to know the specific parameters of mathematical models and internal flight control mechanism, etc., to achieve the effect of easy learning and mastery
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0019] The technical solution of the present invention will be further elaborated below in conjunction with the accompanying drawings.
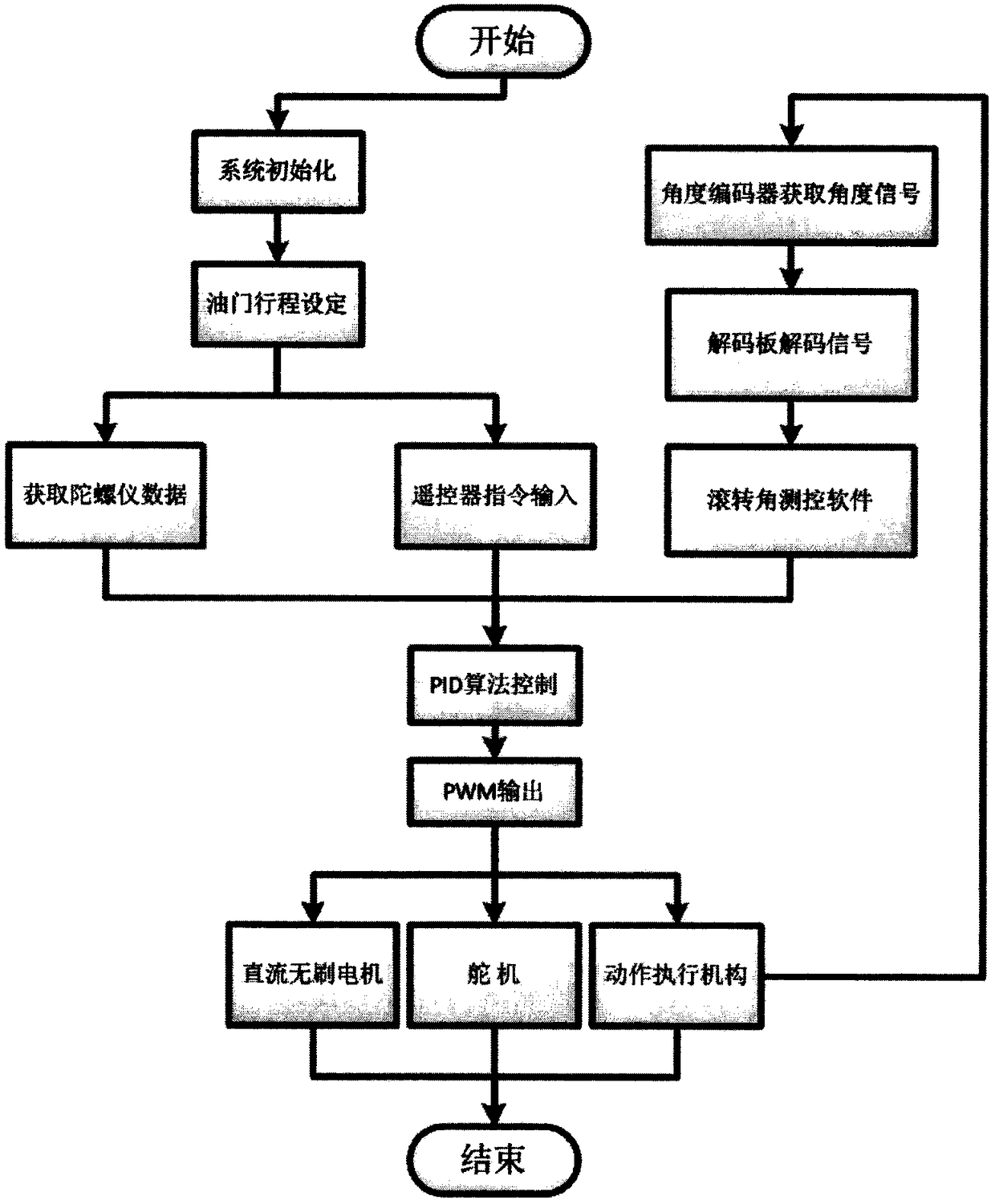
[0020] Such as figure 1 As shown, in order to adjust the attitude of the quadrotor UAV, the roll angle of the UAV must be controlled. Through the gyroscope and sensor, the actual attitude calculated by the attitude of the quadrotor UAV is compared with the expected attitude given by the remote control and the roll angle measurement and control software, and the PID follow-up control is performed to adjust the attitude of the UAV.
[0021] Such as figure 2 As shown, the hardware circuit includes an angle encoder, a main control chip, a decoder board, a gyroscope, a sensor, a remote control, and an attitude adjustment mechanism. The main control chip receives instructions from the remote control through wireless transmission, and at the same time obtains the real-time attitude detected by the gyroscope. The main control chip compares and cal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com