Five-freedom-degree three-dimensional space directed magnetic suspension mouse and method
A three-dimensional space, magnetic levitation technology, applied in the direction of instrument, electrical digital data processing, data processing input/output process, etc., can solve the problems of complex realization technology and principle, achieve the effect of strong scalability, saving resources and avoiding hidden dangers
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0038] This embodiment demonstrates the working principle and specific process of the present invention when the control body of the present invention is in a fully contracted state.
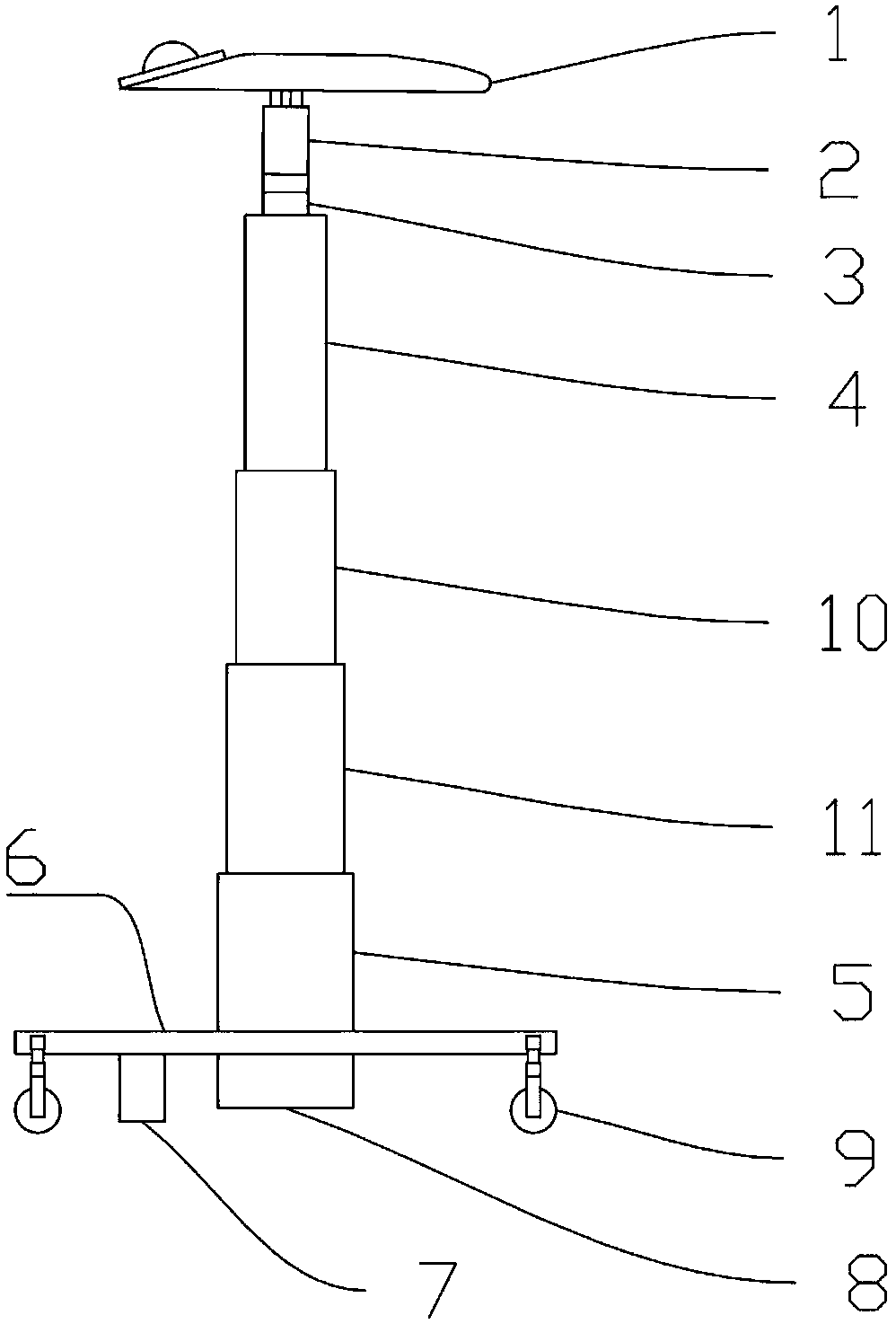
[0039] Such as figure 1 and figure 2 As shown, assuming that the contact surface of the scroll wheel is a desktop, then at this time, the distance between the mouse main body 1 and the desktop is the smallest. The part below the mouse main body 1 is the control main body. The control body is composed of several parts. Except for the top telescopic rod 4, other telescopic rods are located inside the first telescopic rod. Designing the heights of the telescopic rods other than the topmost telescopic rod 4 to be the same is to keep the telescopic rods stable and improve the displacement accuracy of the mouse. The rollers 9 are located around the base 6. The purpose of this design is to obtain the largest supporting area and make the control body more stable. Described roller 9 is to be made o...
Embodiment 2
[0042] This embodiment demonstrates the working principle and specific process of the present invention when the control body of the present invention is in a fully extended state.
[0043] Such as image 3 and Figure 4 As shown, assuming that the contact surface of the scroll wheel is a desktop, then at this time, the distance between the mouse main body 1 and the desktop is the largest. At this time, the electromagnet 34 inside the top telescopic rod 4 will generate a correspondingly large magnetic force to maintain the height of the mouse body 1 unchanged. The magnetic force generated by the electromagnet 34 will directly act on the permanent magnet 43 located on the permanent magnet position 8 . What described permanent magnet 43 adopted is the strong magnetic force permanent magnet design. The magnetic force produced by the permanent magnet will be the same as the magnetic force produced by the electromagnet 34 to generate a repulsive force of the same sex, and the re...
Embodiment 3
[0045] This embodiment shows the design principle and function implementation of each key component of the present invention.
[0046] Such as Figure 5 As shown, the base 6 is a flat cube. In actual production, it is not necessarily required to be a flat cube, but can also be a flat cylinder. As long as the flat plane of the base 6 is parallel to the plane where Can. Four described roller poles 12 are evenly distributed around the base 6, and the lower end of each of the roller poles 12 is equipped with a rotatable roller rotating rod 14, and the lower end of each rotating roller rotating rod 14 is One of said rollers 9 can be attached. The first telescopic rod 5 is designed with the vent hole 13 for dissipating the heat generated by the ranging laser 46 during operation. All the telescopic rods have the conductive groove inside, which can be used to fix the relative rotation position of the telescopic rods, and can also be used to transmit power and signal. Such as Fig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com