Manifold pre-integration-based visual inertial milemeter posture estimation method and device
A pose estimation and pre-integration technology, applied in measurement devices, navigation calculation tools, instruments, etc., can solve problems such as cumulative drift of inertial sensors, and achieve the effects of reducing time drift, suppressing error propagation, and high positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
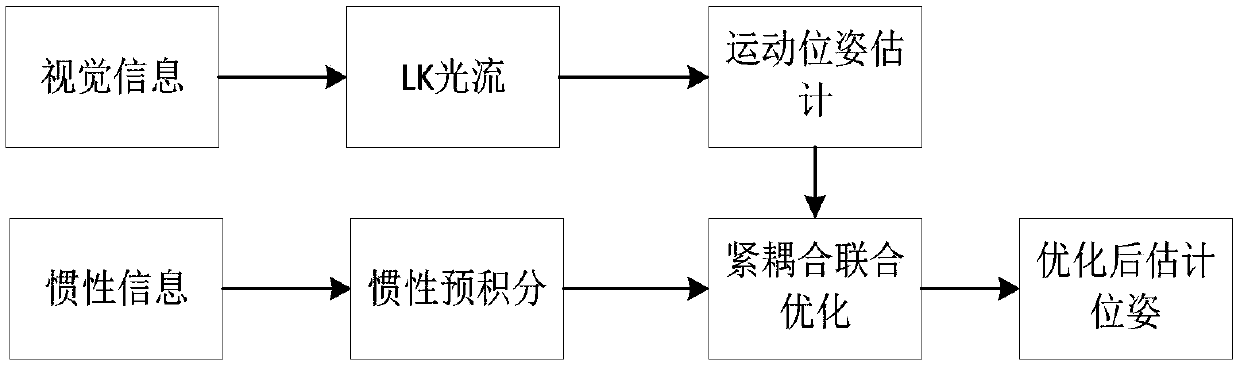
[0107] The visual-inertial odometer system structure of the present embodiment is as follows figure 1 As shown, in the visual-inertial odometry system, the key steps are to design the processing method of the inertial information and the joint optimizer that combines the visual and inertial information. The main role of the joint optimizer is to serve as the interface of the two positioning subsystems to realize the system combination, and to perform data fusion on the positioning information received by the system. In the research process of the inertial subsystem, the pre-integration method on the manifold plays an important role. After the inertial information is obtained, the inertial measurement value is pre-integrated on the Riemannian manifold to form a constraint between two frames of visual measurement information. The joint optimizer is used to jointly optimize the visual information and inertial information, thereby improving the positioning accuracy of the visual-...
Embodiment 2
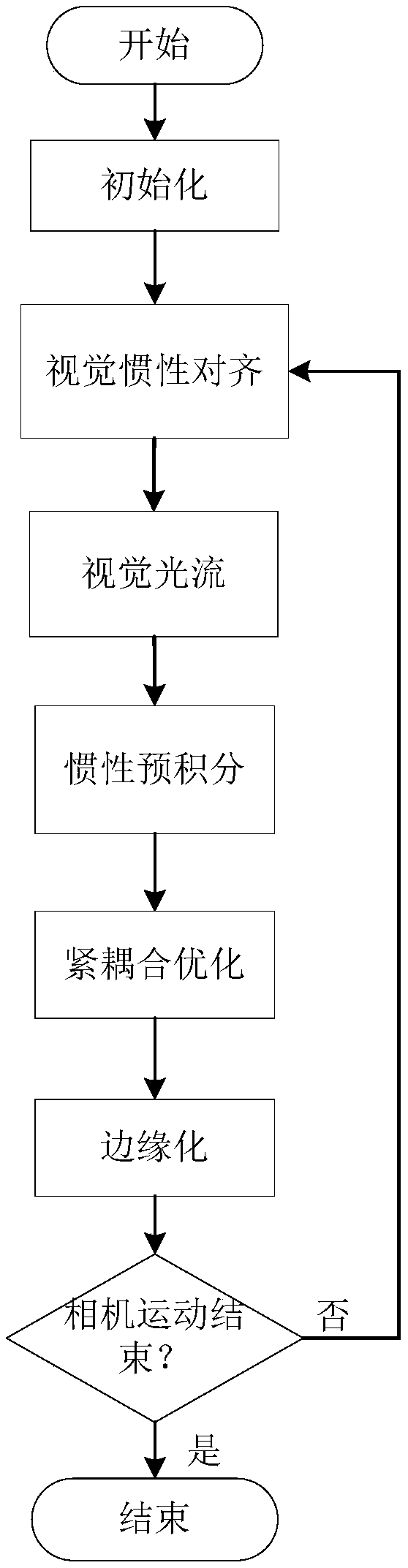
[0194] Such as Figure 6 As shown, this embodiment provides a visual-inertial odometer pose estimation device based on manifold pre-integration, the device includes an initialization module, an inertial data alignment module, a visual optical flow pose estimation module, an inertial pre-integration module, the first One optimization module and the second optimization module, the functions of each module are as follows:
[0195] The initialization module is used to complete the initialization of the visual-inertial odometry system;
[0196] The inertial data alignment module is used to obtain all inertial data between two frames of visual images by marking time stamps on visual data and inertial data;
[0197] The visual optical flow pose estimation module is used to perform LK optical flow method matching on the visual image obtained in each frame with the last frame of visual image stored in the system, to obtain tracking point information between two frames of visual images...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com