


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Steering device and four-legged robot comprising same
A quadruped robot and steering device technology, which is applied in the field of quadruped robots with variable leg length, can solve problems such as inconvenient steering, easy robot overturning, robot overturning, etc., and achieves reduced manufacturing and steering control costs, simple steering method, The effect of steering stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0037]The length-changing quadruped robot described in the present invention includes front legs and rear legs, and the expansion and contraction of the front legs and / or rear legs is realized by pneumatic muscles. The front legs and rear legs each include two, two The front legs are connected by a connecting rod, and the two rear legs are connected by a connecting rod; the front legs and the rear legs each include a thigh installed on the body, and a support plate is fixed on the lower part of the thigh, and the support plate is provided with 4 holes, the upper ends of the 4 anti-bending rods pass through the 4 holes on the support plate, and the upper ends of the four anti-bending rods can slide up and down in the four holes, and the four anti-bending rods are surrounded by Pneumatic muscles are provided in the space, and the bottom of the aerodynamic muscles and the lower ends of the four anti-bending rods are connected to the feet, and the length of the legs can be adjusted...
Embodiment 2
[0041] Further, the leg length-changing quadruped robot includes front legs and rear legs, and the expansion and contraction of the front legs and / or rear legs is realized by hydraulic cylinder expansion and contraction. The front legs and the rear legs each include two, the two front legs are connected by a connecting rod, and the two rear legs are connected by a connecting rod; the front legs and the rear legs each include a thigh installed on the body, and the The thigh is a telescopic hydraulic cylinder, and the length of the leg can be adjusted through the expansion and contraction of the hydraulic cylinder.
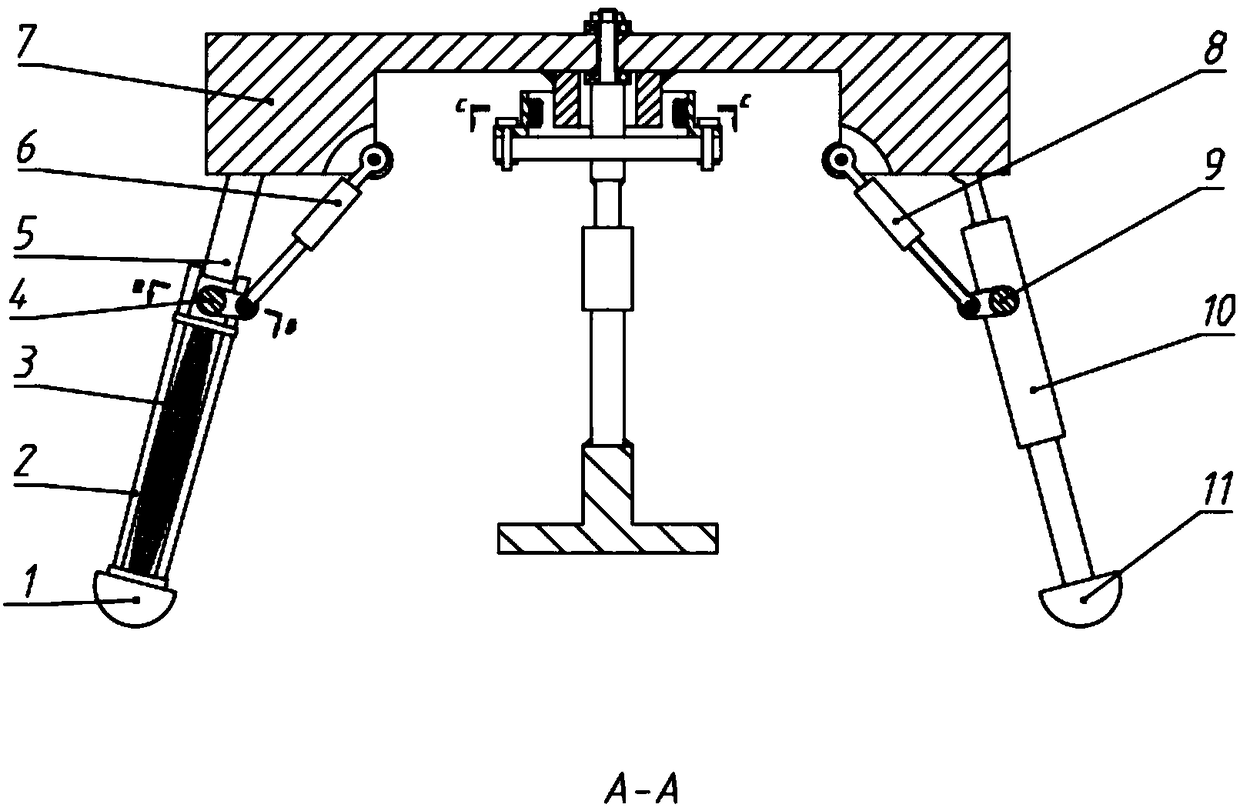
[0042] Specifically, as attached Figure 7 and figure 2 As shown, the structural diagram of the front leg part, which includes the front leg foot end 11, the front leg foot end 11 is connected to the driving end of the front leg thigh hydraulic cylinder 10, and the adjustment of the leg length is realized through the expansion and contraction of the hydraulic cyli...
Embodiment 3
[0045] Further, the leg length-changing quadruped robot includes front legs and rear legs, and the expansion and contraction of the front legs is achieved by hydraulic cylinders or cylinders, and the expansion and contraction of the rear legs is achieved by pneumatic muscles, such as figure 1 shown;
[0046] The rear leg is a structural configuration of one leg joint, one degree of freedom in pitching of the thigh, and one thigh with variable leg length. The left and right hind legs pass through the connecting rod between the 4 hind legs Figure 4 The shown bolt group is connected, and one end of the rear leg swing hydraulic cylinder 6 is hinged on the body, and one end is hinged at the center of the connecting rod 4 between the rear legs (as Figure 4 ). The expansion and contraction of the rear leg swing hydraulic cylinder 6 can simultaneously drive the left and right rear legs to move synchronously to realize the bound gait of the robot. The expansion and contraction of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com