AUV longitudinal speed guidance method in underwater dynamic docking process
A longitudinal speed and dynamic technology, applied in the direction of electric speed/acceleration control, etc., can solve the problems of sudden changes in speed curves and too simple ideas, and achieve the goal of improving docking safety, shortening docking time, and taking into account both speed and safety. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention is described in more detail below in conjunction with accompanying drawing example:
[0032] The present invention comprises the steps:
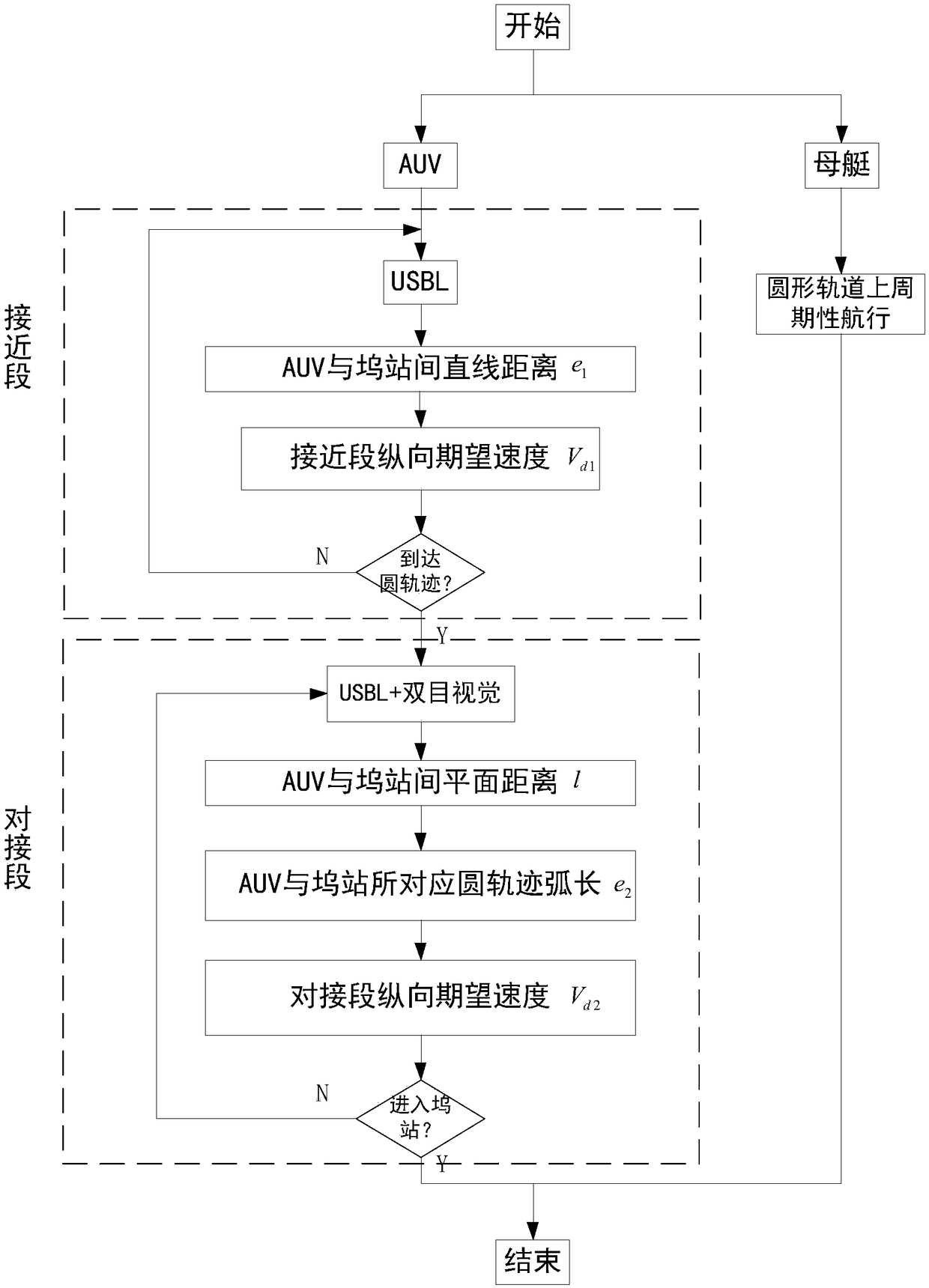
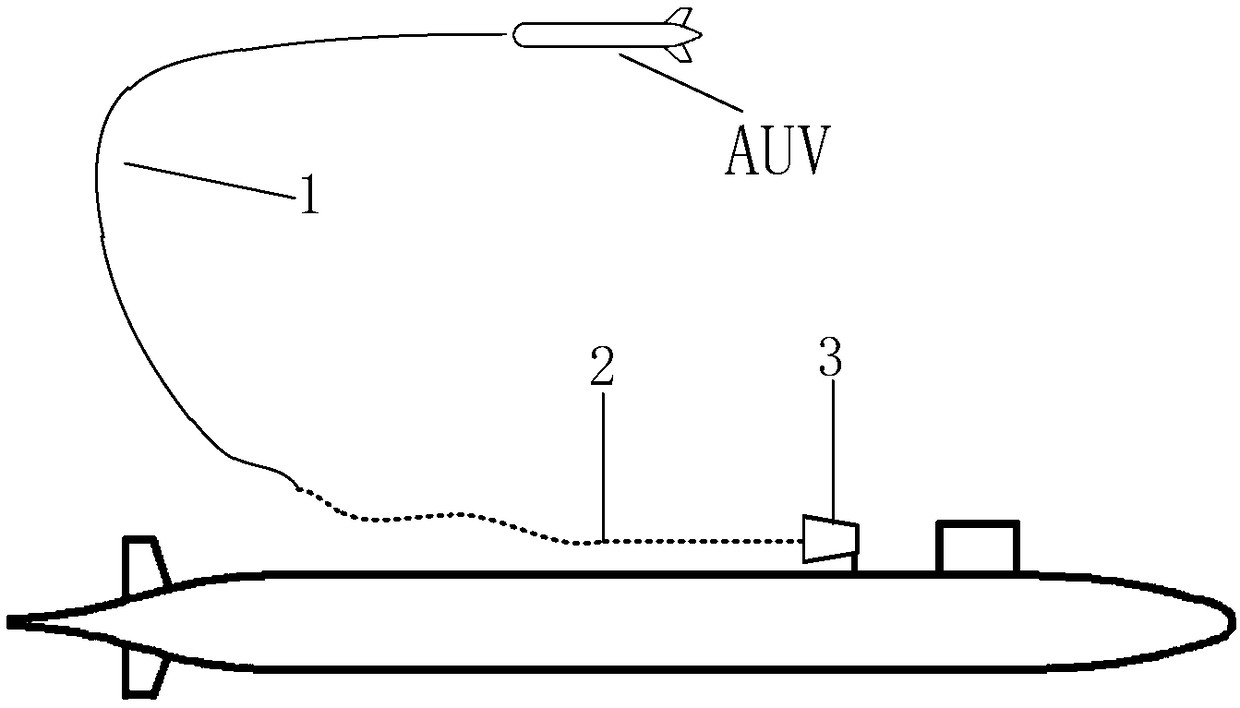
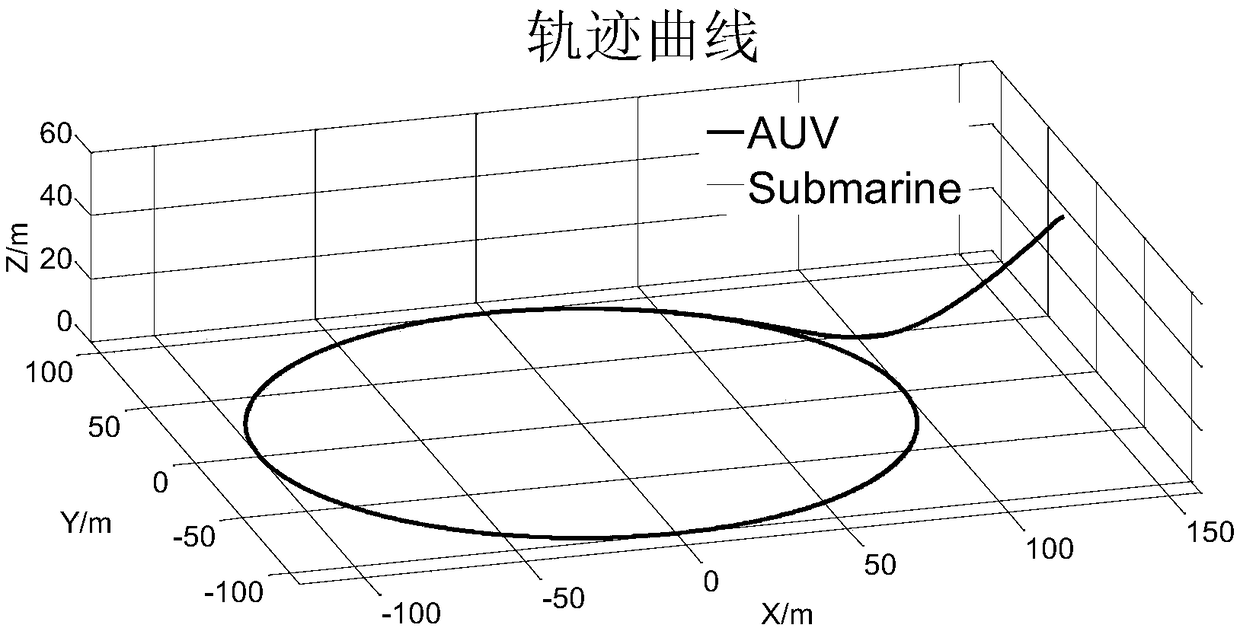
[0033] (1) The docking process between the mothership and the AUV is divided into an approaching segment and a docking segment, and the mothership sails periodically on a predetermined plane circular trajectory. The AUV is the approaching segment from returning to the circular trajectory, and the docking segment from the circular trajectory to the completion of docking.
[0034] (2) In the approach section, the distance between the center of gravity of the AUV and the docking station is selected as the reference quantity, and the longitudinal velocity equation is designed according to the reference quantity.
[0035] (3) In the docking section, the arc length of the circular orbit corresponding to the center of gravity of the AUV and the docking station is selected as a reference quantity, and the longitudinal v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com