Crane load identification, measurement and adjustment control method
A technology of load identification and control method, applied in cranes, load hanging components, safety devices, etc., can solve the problems of cumbersome installation, accidents, and low accuracy of load mass measurement, so as to avoid safety accidents and avoid errors. , Reduce the effect of starting fuel consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0102] like figure 1 As shown, a control method for crane load identification, measurement and adjustment includes the following steps:
[0103] a. Obtain the load data of the crane, obtain the magnification of the wire rope, and obtain the pressure value and flow value at the outlet of the crane oil pump;
[0104] b. According to the obtained crane load data, calculate the load quality of the crane;
[0105] c. Determine whether the load quality exceeds the preset load limit, if yes, go to step d; if not, the crane can work normally;
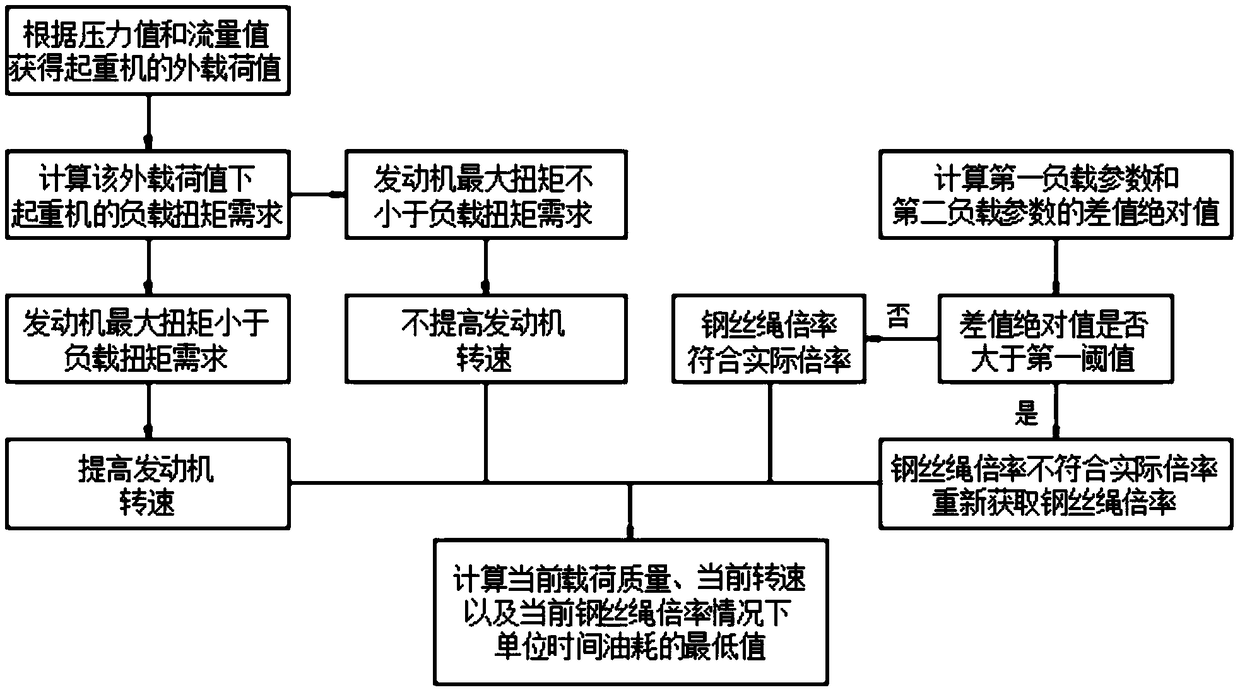
[0106] d. Calculate the first load parameter and the second load parameter of the crane according to the wire rope magnification; calculate the load torque demand according to the pressure value and flow value;
[0107] e. According to the load quality, wire rope magnification and load torque requirements, perform torque control operations and collect the value of the strain signal ε;
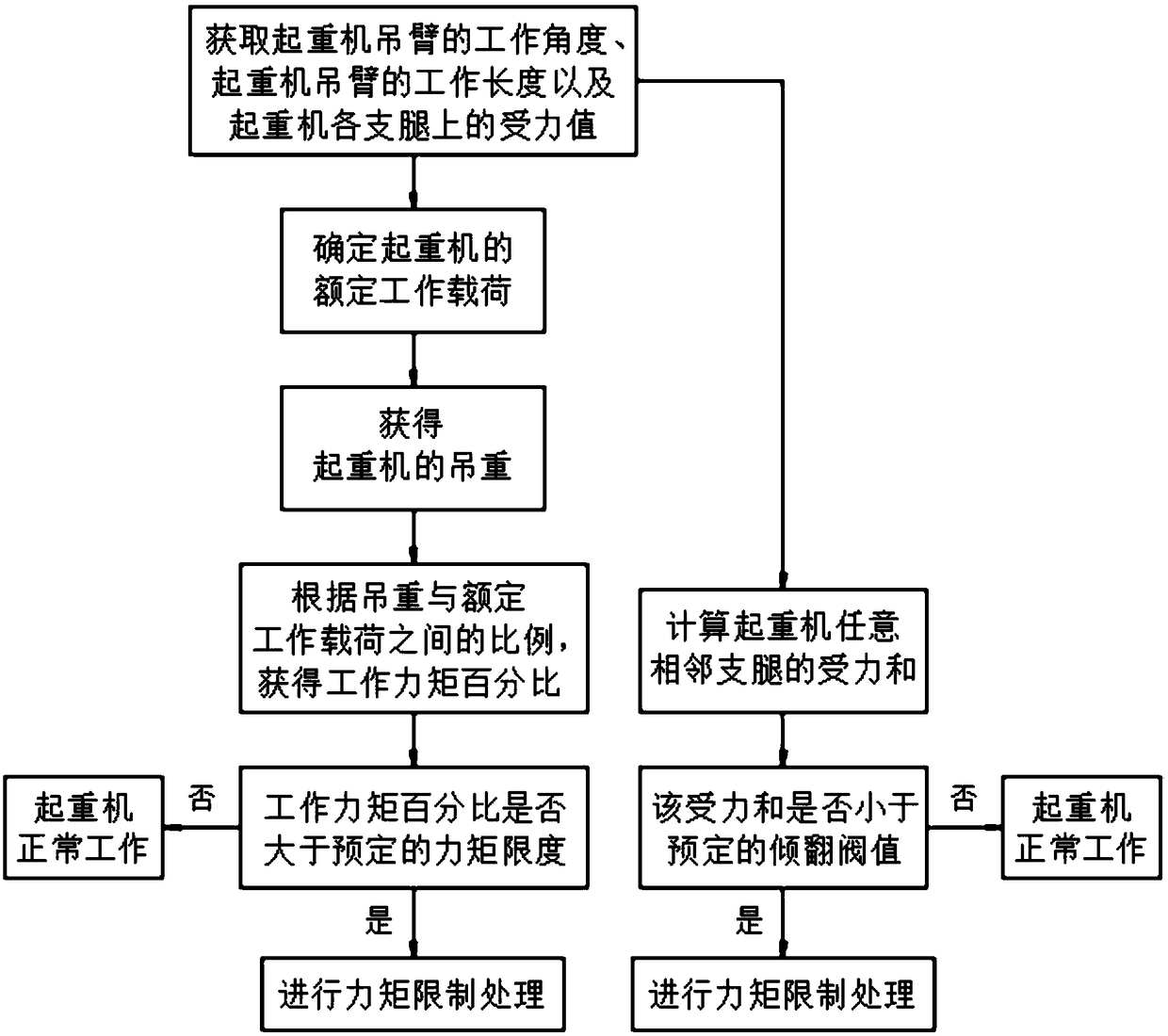
[0108] f. Perform safety protection operations accordin...
Embodiment 2
[0111] In this embodiment, on the basis of Embodiment 1, the steps of obtaining the load data of the crane in the step a are as follows:
[0112] Measure the three-phase voltage, three-phase current and their relationship of the hoisting motor when the crane is loaded upwards, and obtain the electric energy P input by the system when the crane is loaded e and stator current i 1 ;
[0113] Obtain the electric energy P input when the crane is unloaded e (0) and stator current i 1 (0);
[0114] Obtain the ascent velocity V of the crane when it is unloaded 0 , The stator resistance R of the lifting motor 1 and acceleration a at startup.
[0115] This embodiment is used to collect relevant parameters of the crane load data, and the collected data is comprehensive and effective, thereby making the calculation of the load data more accurate.
Embodiment 3
[0117] In this embodiment, on the basis of Embodiment 2, the step of calculating the load quality of the crane in the step b includes:
[0118] m=[P e -P e (0)-3×(i 1 2 -i 1 (0) 2 )×R 1 ] / [g+a]V 0
[0119] When the acceleration a when the crane starts is much smaller than the gravitational acceleration g, set a=0, and the load mass of the crane at this time m=[P e -P e (0)-3×(i 1 2 -i 1 (0) 2 )×R 1 ] / gV 0 ;in:
[0120] P e is the electric energy input by the system when the crane is loaded; P e (0) is the electric energy input when the crane is unloaded; i 1 Stator current when the crane is loaded; i 1 (0) is the stator current when the crane is no-load; R 1 is the stator resistance of the hoisting motor of the crane; V 0 is the lifting speed of the crane when it is unloaded; g is the acceleration due to gravity; a is the acceleration when the crane starts.
[0121] The load mass of the crane can be calculated through this algorithm, which improves the me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com