A Strapdown Inertial Navigation System with Nonlinear Compensation Filter
A non-linear compensation, strapdown inertial navigation technology, applied in the direction of navigation calculation tools, etc., can solve the problems of reliability, maintainability and cost restricting the accuracy of inertial components, difficulty in the accuracy of inertial components, and low cost of precision, and achieve low cost. , the effect of improving the accuracy and improving the accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
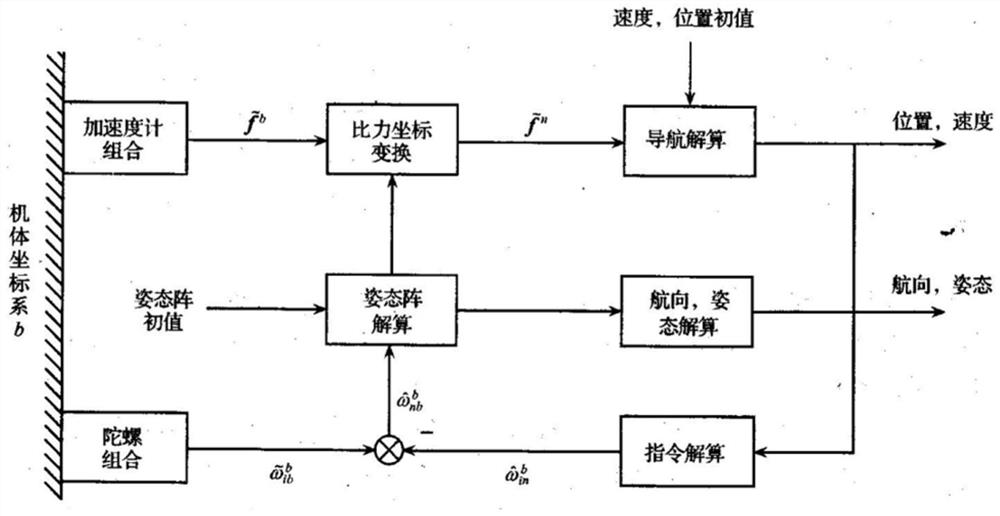
[0070] In the present invention, it is defined that the navigation coordinate system (n system) coincides with the geographic coordinate system (g system), and its x n Axis points east, y n Axis points north, z n The axis refers to the sky; the x of the body coordinate system (b system) b The axis points to the right side of the body, y b The axis points to the nose along the longitudinal axis of the body, z b The axis points to the top of the body. The output of the MEMS gyroscope in low dynamic conditions is collected. The MEMS accelerometer bias is 2mg, the gyroscope bias is 60° / h, the sampling time is 1200s, and the sampling interval is 0.05s, that is, 200 accelerometers are collected within 1s. and gyroscope information
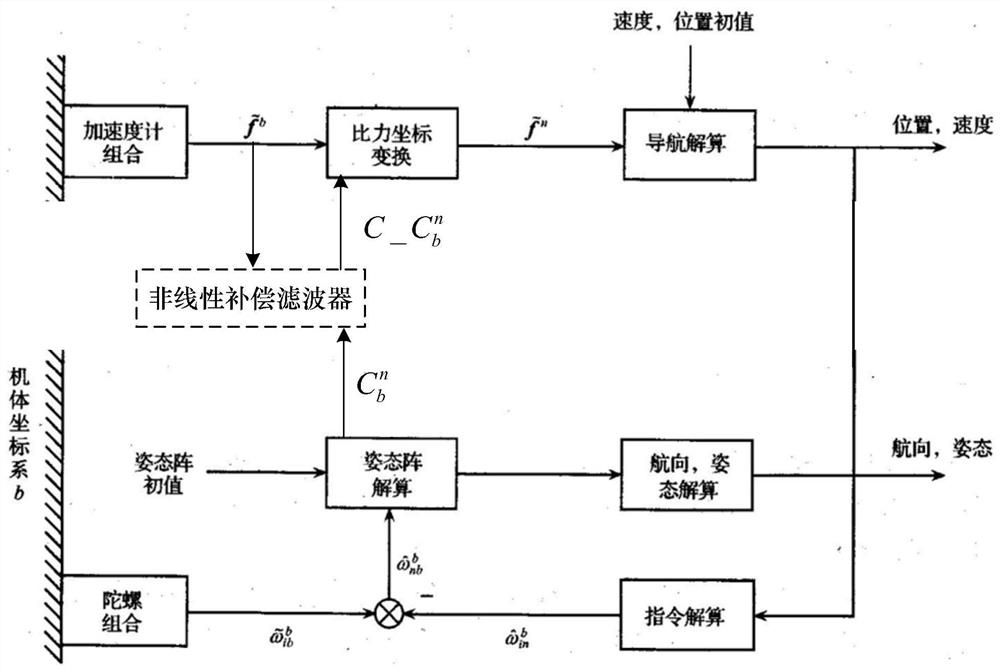
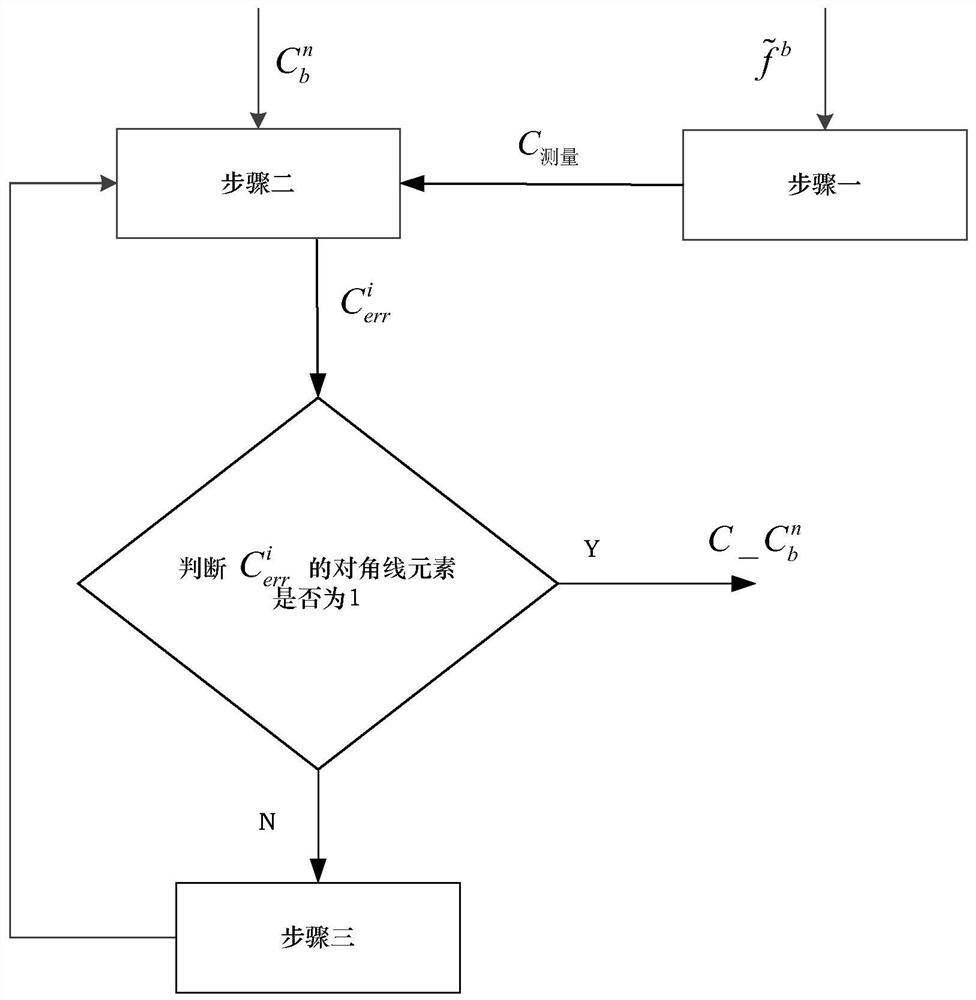
[0071] use figure 2 PCF_SINS shown, respectively add nonlinear compensation filter (execute image 3 process) and the navigation attitude without adding the nonlinear compensator, get the attitude after the solution, and compare, the results a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com