Attitude determination method and device
A technique for determining a method and an attitude, which is applied in the field of attitude determination methods and devices, and can solve problems such as low attitude accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] Hereinafter, exemplary embodiments according to the present disclosure will be described in detail with reference to the accompanying drawings. Apparently, the described embodiments are only some of the embodiments of the present disclosure, rather than all the embodiments of the present disclosure, and it should be understood that the present disclosure is not limited by the exemplary embodiments described here.
[0038] Application overview
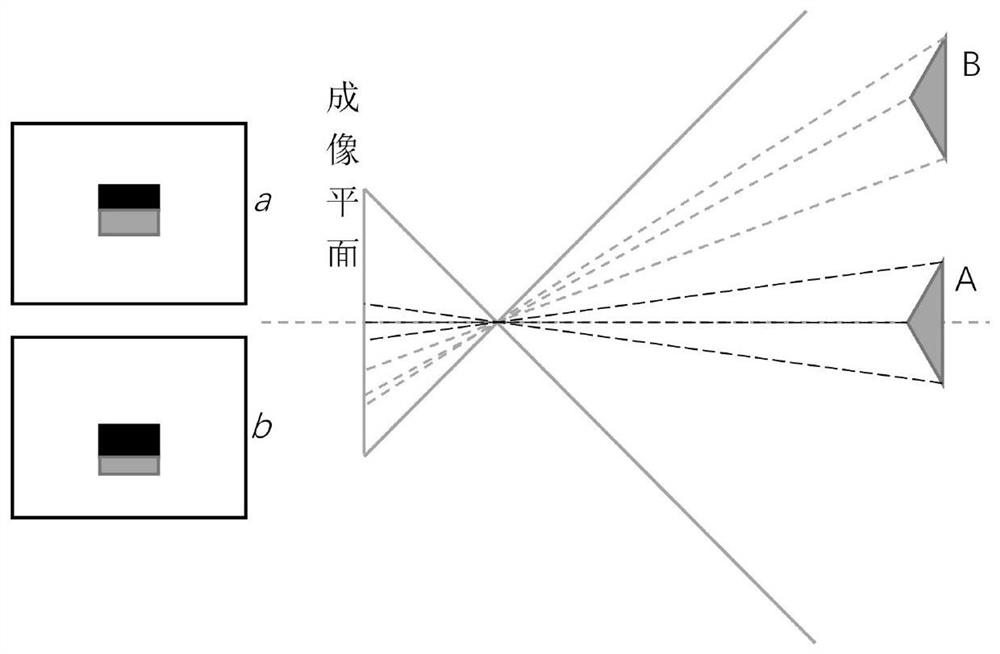
[0039] Such as figure 1 As shown, taking the triangular prism in the image as the target object, when the triangular prism is at position A (optical axis position), the obtained image is a, that is, two rectangles with the same height and width at the top and bottom; when the triangular prism is translated to position B (The attitude of the triangular prism does not change), and the obtained image is b, that is, two rectangles with different heights and widths. It can be seen that even if the attitude of the target object is t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com