Synchronous tracking control method of main mechanical arm and auxiliary arm based on quantitative communication
A main manipulator and synchronous tracking technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of difficult to achieve complete accuracy in information exchange, the influence of manipulator tracking control, etc., to achieve simplified implementation, high use and promotion Value, good effect of use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
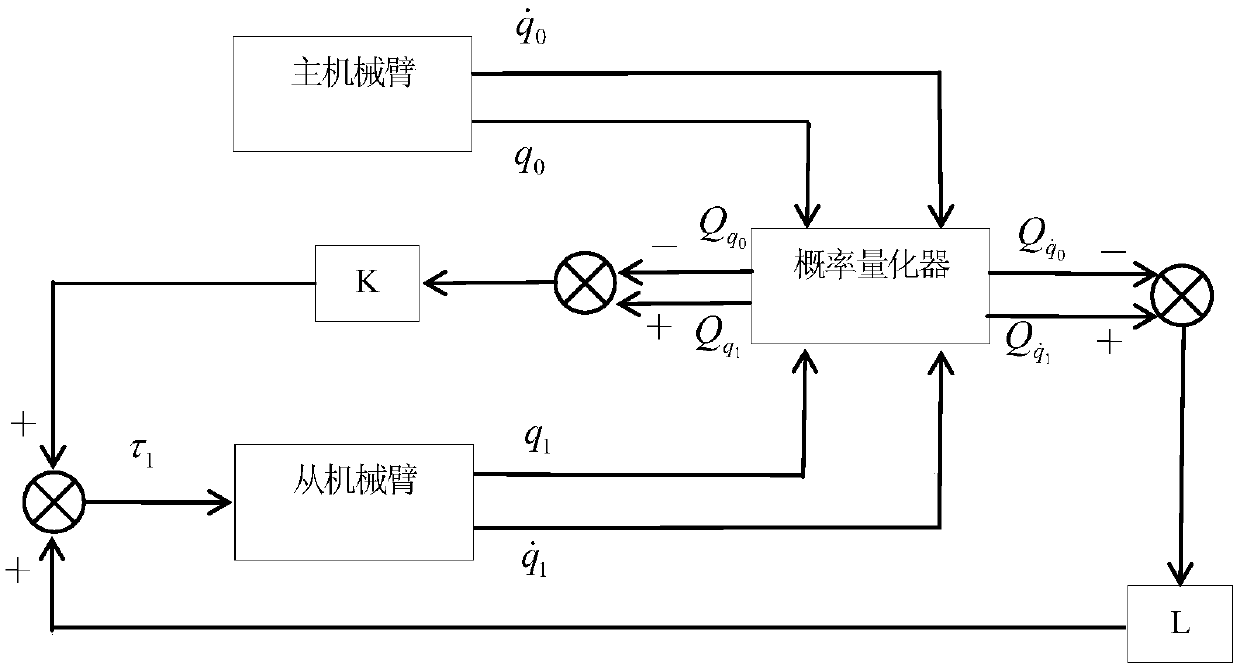
[0039] As shown in the figure, the present invention discloses a master-slave manipulator synchronous tracking control method based on quantitative communication.
[0040] Specifically, the present invention is used to control a multi-manipulator system, and the multi-manipulator system includes a master manipulator and a slave manipulator. In this embodiment, the multi-manipulator system includes a master manipulator and a slave manipulator Arm, the end trajectory of the robotic arm can be observed in all states. In this example, two robotic arms with 2 degrees of freedom of the same model are used as test objects. One robotic arm is randomly selected as the master robotic arm, and the other robotic arm is the slave robotic arm. See the specific system structure figure 1 shown.
[0041] The quantitative communication-based master-slave manipulator synchronous tracking control method of the present invention comprises the following steps:
[0042] S1. Set the motion modes of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com