Target tracking method of mobile robot based on electrical-hydraulic focusable lens
A mobile robot and target tracking technology, applied to color TV components, TV system components, TVs, etc., can solve problems affecting performance, reducing edge information, preventing video observers from observing details and edge information of targets, etc. , to improve the stability of the
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0045] In order to make the technical scheme and main points of the present invention clearer, below in conjunction with accompanying drawing, the implementation steps of the present invention are described in detail:
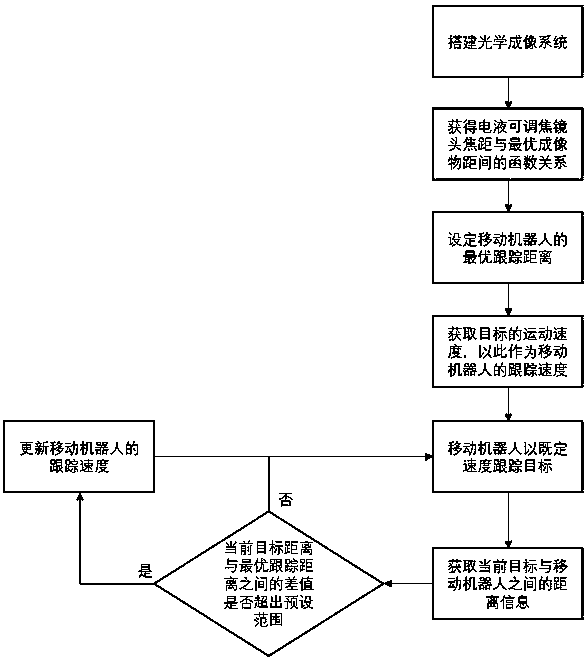
[0046] Such as figure 1 As shown, a target tracking method for a mobile robot based on an electro-hydraulic adjustable focus lens includes the following steps:
[0047] 1) An optical imaging system is composed of an electro-hydraulic adjustable focus lens and a fixed focus lens;
[0048] 2) Obtain the functional relationship between the focal length of the electro-hydraulic adjustable focus lens and the optimal imaging object distance;
[0049] 3) Set the optimal tracking distance of the mobile robot;
[0050]4) Get the moving speed of the target, and use it as the tracking speed of the mobile robot;
[0051] 5) The mobile robot tracks the target at a given speed;
[0052] 6) Obtain the distance information between the current target and the mobile robot; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com