Six-degree-of-freedom upper limb rehabilitation robot control system
A rehabilitation robot and control system technology, which is applied in the field of robotics and rehabilitation medicine, can solve the problems that the residual limb strength of the patient cannot be effectively used, cannot provide high synchronization of the motors at the joints, and is not conducive to accurate feedback of the rehabilitation effect of the patient. Effects of reducing system cycle time, simplifying structure, and improving motivation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The following is a detailed description of the embodiments of the present invention. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
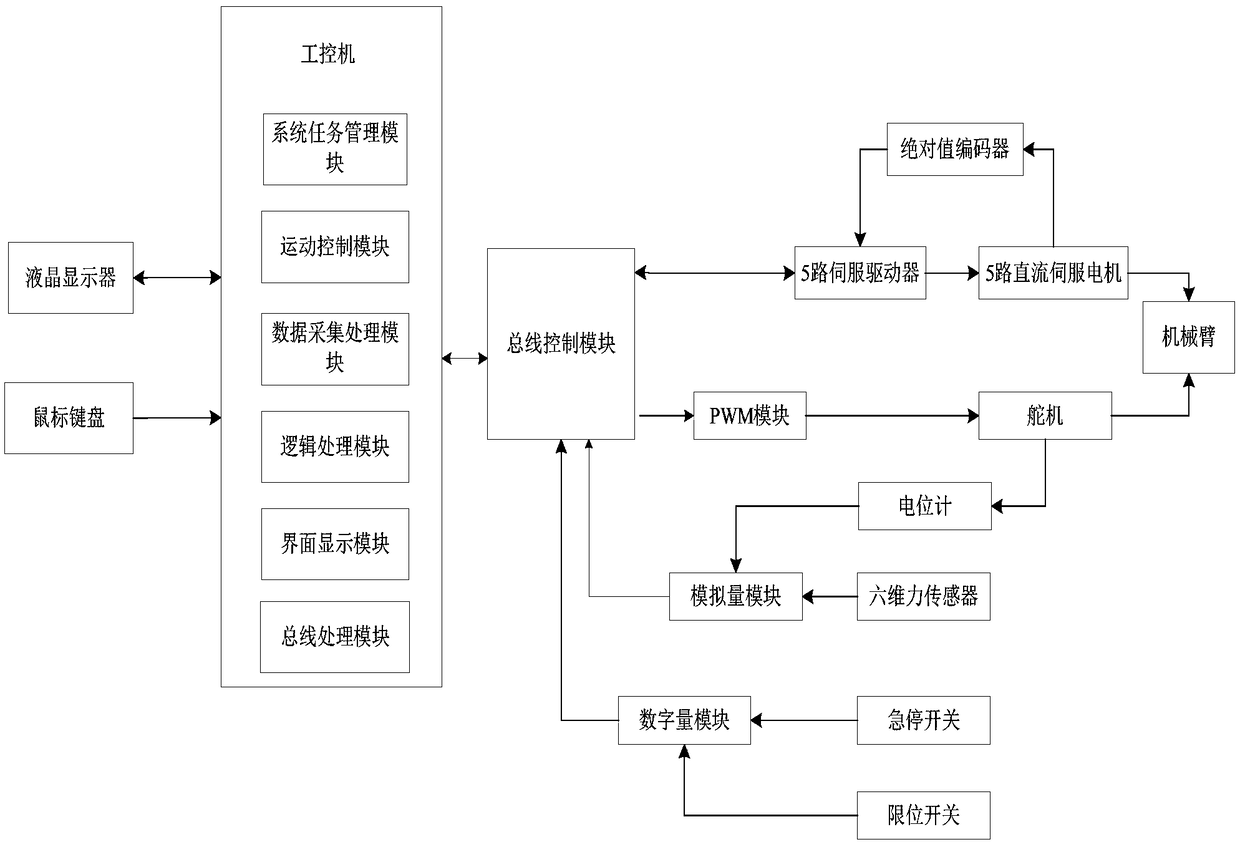
[0039] The upper limb rehabilitation robot control system described in the embodiment of the present invention is an Ethernet bus topology, and its structural block diagram is shown in figure 1 , including the industrial computer and the control system software carried in the industrial computer and the liquid crystal display connected to the industrial computer, the mouse keyboard and the bus control module; the bus control module communicates with a PWM module, an analog module and a digital quantity through an internal bus The modules are connected, and the bus control module is connected to the 5-w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com