Extended holosymmetric multi-cell set membership Kalman hybrid filtering method
A polymorphic and fully symmetrical technology, applied in complex mathematical operations, instruments, pattern recognition in signals, etc., can solve the problem of high computational complexity of filtering methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific example
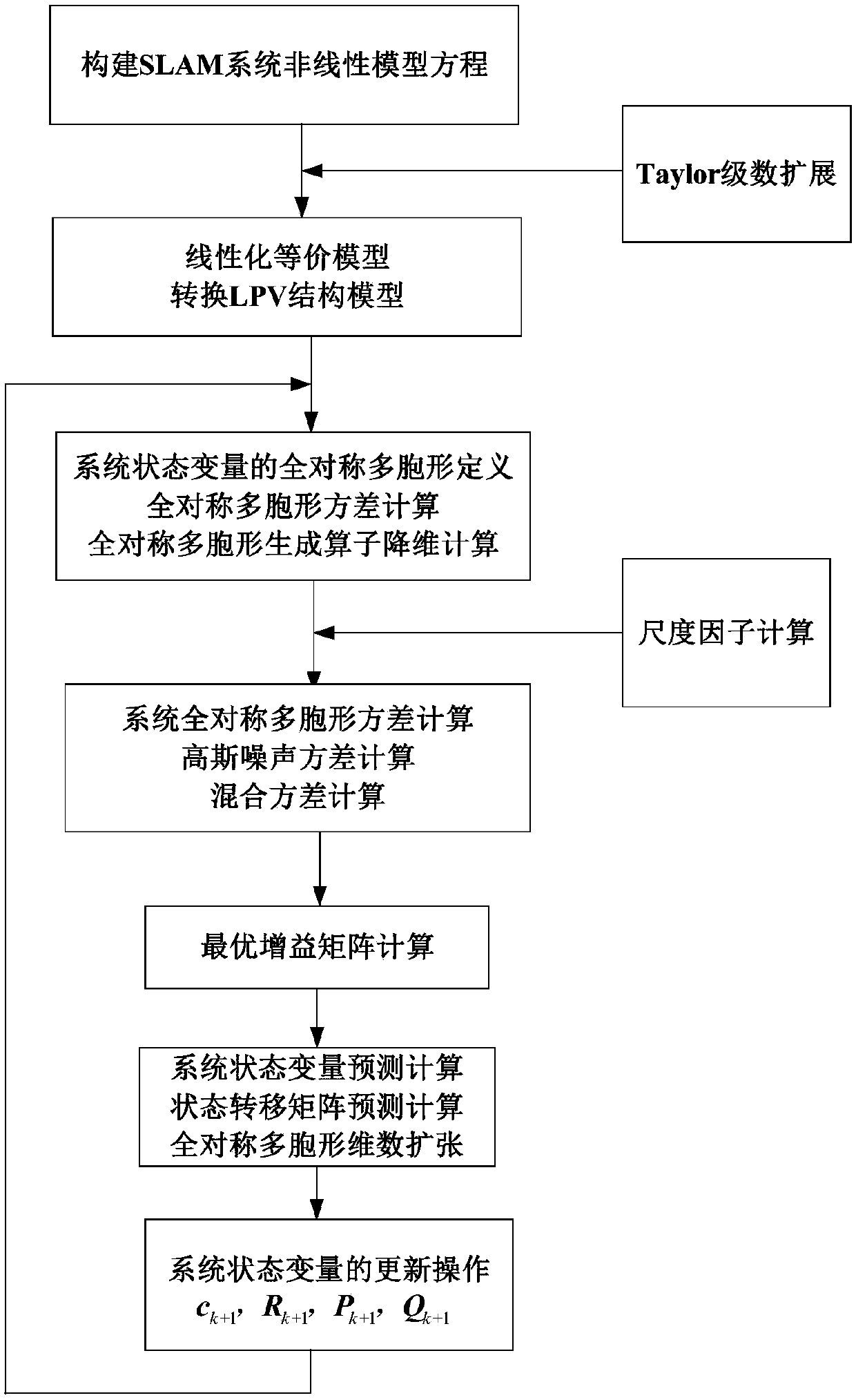
[0150] Specific example: Considering the SLAM problem of the robot motion carrier, the carrier motion equation can be given in the Cartesian coordinate system as:
[0151]
[0152] Here the state vector of the SLAM system is x k =[x k ,y k ,φ k ] T , respectively represent the position coordinates and orientation of the carrier at the kth step; V is the carrier velocity, G represents the steering angle of the carrier, the parameter WB represents the wheelbase of the carrier, and the noise vector v k is the Gaussian process noise, v k ~N(0,Q k ), where Q k Indicates the noise variance.
[0153] The robot motion carrier is equipped with distance and orientation sensors, which can perceive the target object within a distance of 30m within the range of ±30° in the azimuth angle. From this, the observation equation of the robot SLAM system can be obtained as:
[0154]
[0155] Among them, (r i,x ,r i,y ) is the position coordinate of the landmark perceived by the se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com