Autonomous navigation system and method for UAV based on equipotential surface of electric field in UHV line area
An autonomous navigation system and UHV line technology, which is applied in the field of autonomous navigation system of unmanned aerial vehicles on potential surfaces, can solve the problems of uncontrolled unmanned aerial vehicles, inaccurate sight of human eyes, and easy deviations.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
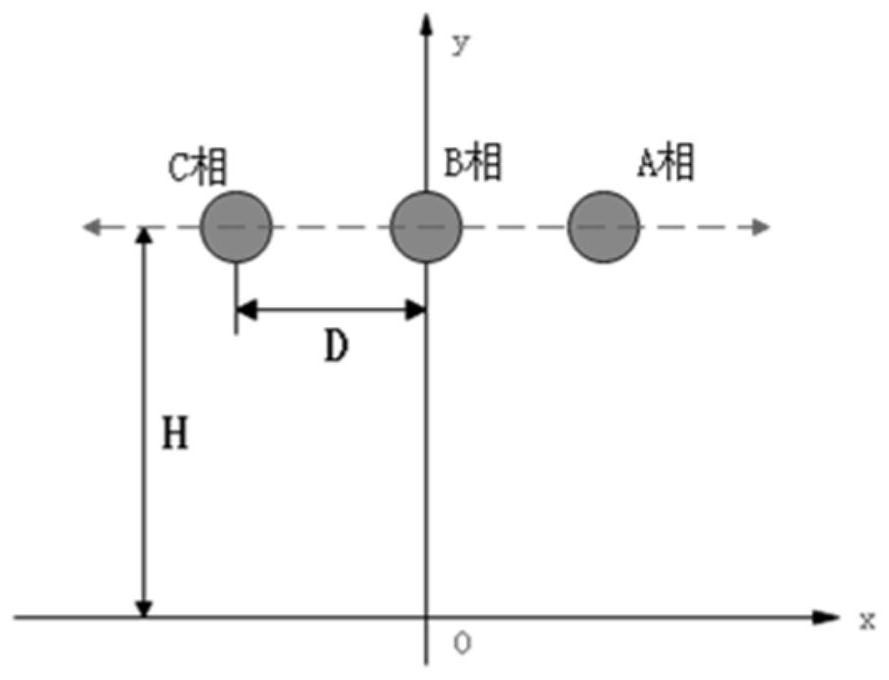
[0045] In this example, the field model experiment of EHV transmission line is carried out. The EHV transmission line in the set model is 500KV. The approximate relationship between the distance between transmission lines (D) and the distance between transmission lines (H) is as follows: figure 1 As shown, phase A, phase B, and phase C respectively represent three-way transmission lines on the tower. The radius of the four split wires is 0.3m, and the radius of the second split wire is 0.0418m. Taking the ground at zero potential and considering the ground as a good conductor, an analog charge can be set at the mirror position of the wire corresponding to the ground, which is equivalent to replacing the influence of the induced charge on the ground.
[0046] Set matching points on the surface of each phase conductor, and solve the following matrix to obtain the simulated charge τ n(m) for:
[0047]
[0048] In the formula, P is the potential system matrix, and the potenti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com