Pedestrian indoor track positioning method
A technology for trajectory positioning and pedestrians, which can be used in navigation, measuring devices, instruments, etc. through speed/acceleration measurement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
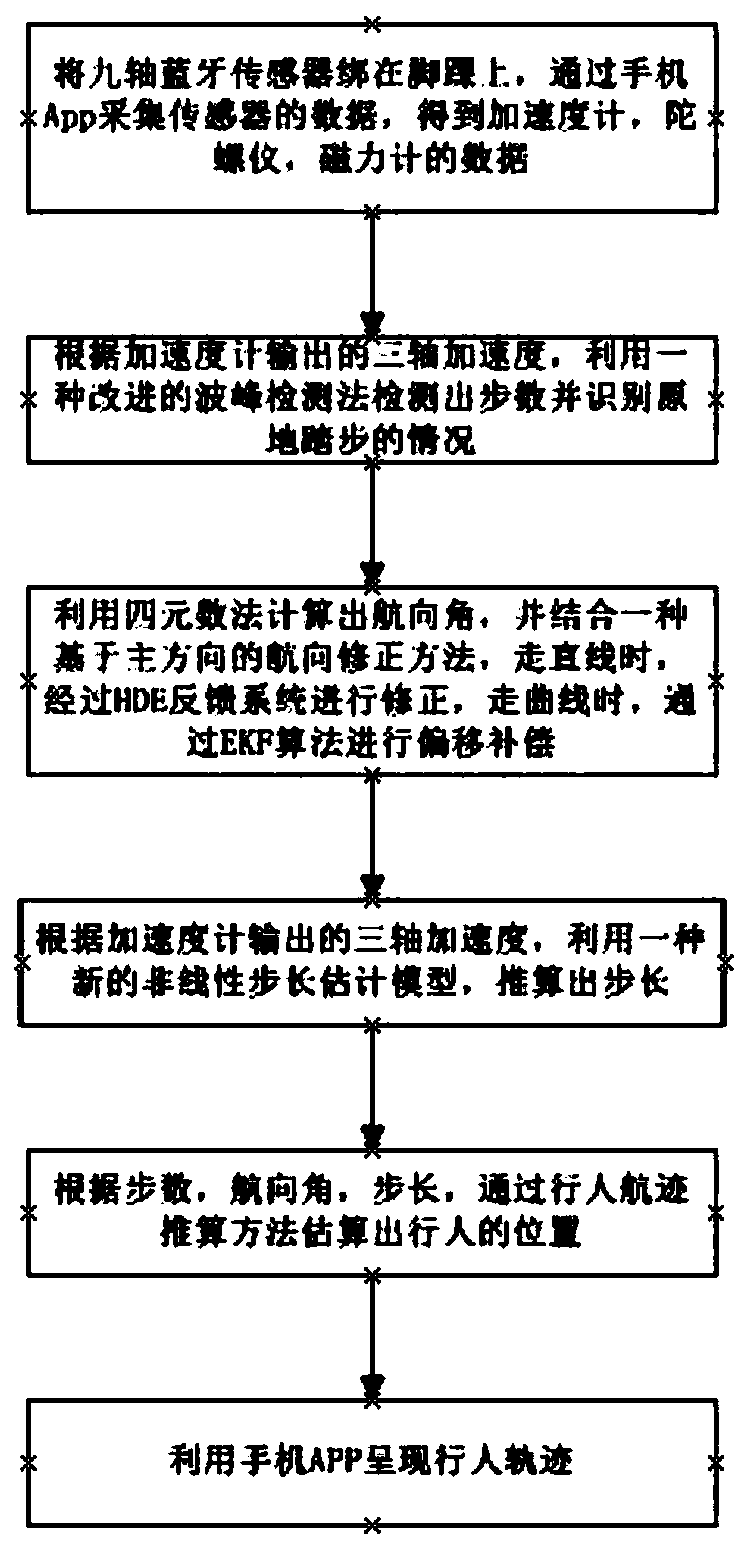
[0014] A pedestrian indoor trajectory positioning method, such as figure 1 shown, including the following steps,
[0015] Using sensors to collect triaxial acceleration, triaxial angular velocity and triaxial magnetic induction in the carrier coordinate system as data sources, the triaxial are X axis, Y axis and Z axis;
[0016] Step counting and gait detection;
[0017] Calculate the heading angle, and correct the heading angle based on the main direction: when walking in a straight line, use the heuristic random drift elimination method to correct the heading angle; when walking in a curve, use the extended Kalman filter to perform offset compensation and correct the heading angle;
[0018] According to the three-axis acceleration, a nonlinear step size estimation model is established to calculate the step size during the travel process;
[0019] According to the gait, walking steps, heading angle and step length, the walking trajectory and position of pedestrians are calc...
Embodiment 2
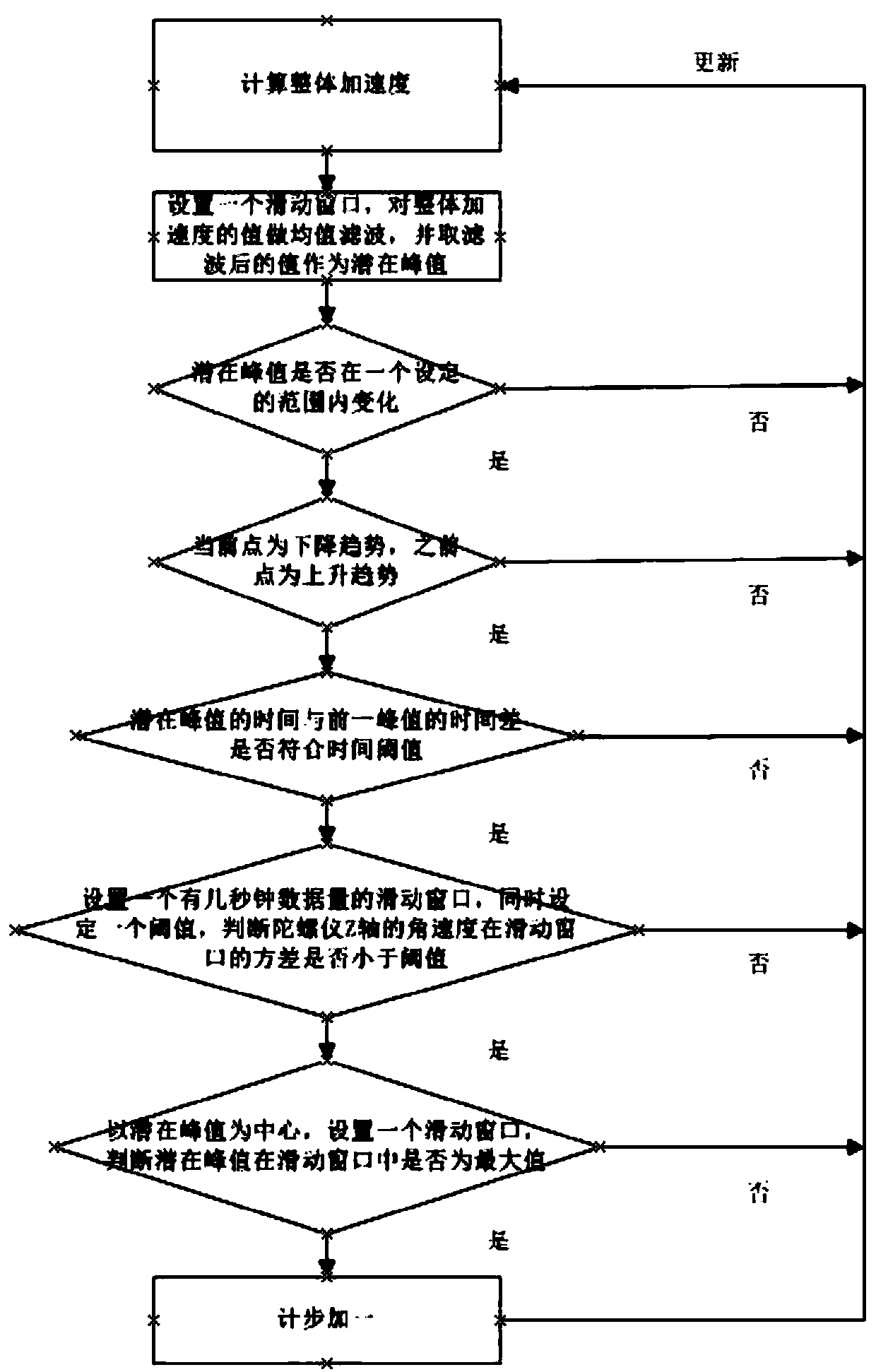
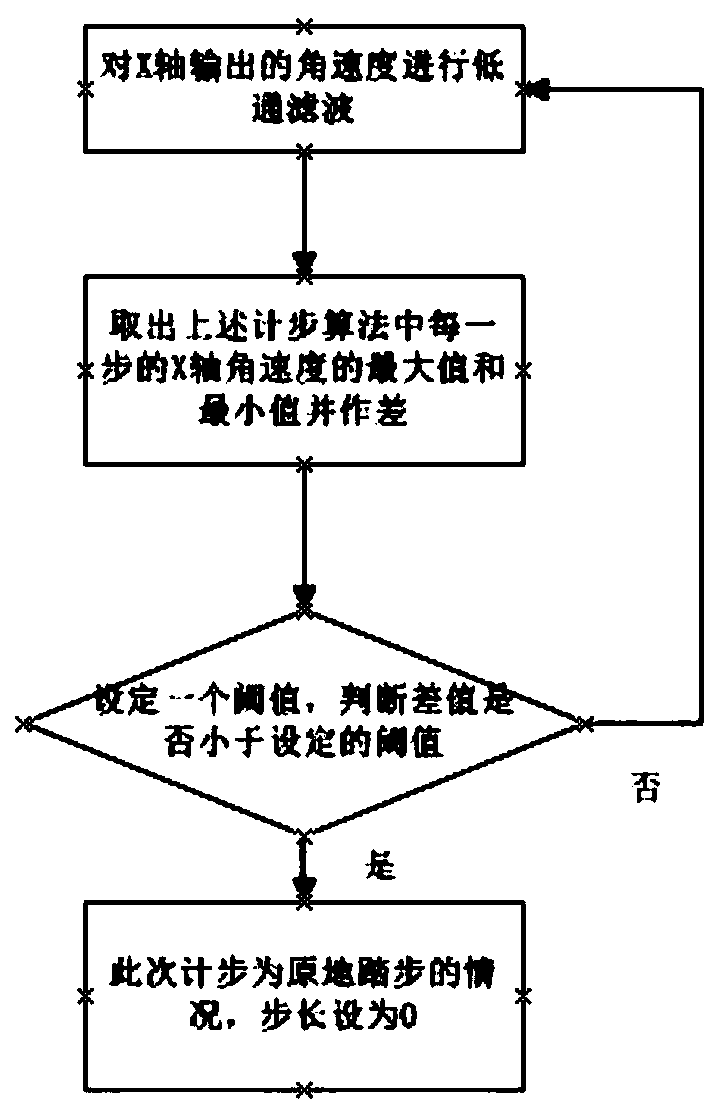
[0024] On the basis of embodiment 1, step counting and gait detection adopt the following mode in the present embodiment:
[0025] S11, collecting data in three directions of the X-axis, Y-axis, and Z-axis of the built-in accelerometer, gyroscope, and magnetometer of the sensor and saving them;
[0026] S12. Calculate the overall acceleration, calculate the overall acceleration through the three-axis acceleration of the accelerometer, avoid factors such as irregular acceleration and large errors in the vertical direction of the human body caused by the difference between the carrier coordinate system and the geographic coordinate system, and reduce the impact caused by the equipment attitude influence, calculated as
[0027]
[0028] where a x 、a y 、a z It is the real-time acquisition value of the accelerometer in three directions x, y, z;
[0029] S13. Carry out mean filtering to the overall acceleration; set a sliding window, divide the data in each window into a grou...
Embodiment 3
[0041] On the basis of Embodiment 1, the process of performing the heading angle correction based on the main direction in this embodiment is:
[0042] S21. The acceleration a of the three directions in the carrier coordinate system b b (a x , a y , a z ), through the quaternion coordinate transformation matrix Transform to navigation coordinate system n system a n (a 东 ,a 北 ,a 天 );
[0043] S22. The direction of each walk is determined by the attitude angle. The attitude angle includes the heading angle ψ, the pitch angle θ, and the roll angle γ. It is obtained by the equation group composed of formulas (2) to (4):
[0044]
[0045]
[0046]
[0047] in, is the quaternion coordinate transformation matrix;
[0048] Quaternion coordinate transformation matrix According to the angular velocity output by the gyroscope, it is calculated using the following quaternion differential equation;
[0049]
[0050] Among them, Q(q 0 ,q 1 ,q 2 ,q 3 ) is a qua...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com