Series-parallel-connection robot leg configuration, walking robot and movement method thereof
A walking robot and hybrid mechanism technology, applied in the field of robotics, can solve problems such as small working space, large moment of inertia, and complex structure, and achieve the effects of increasing rotation angle, simple motion control, and increasing contact area
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the drawings and specific embodiments.
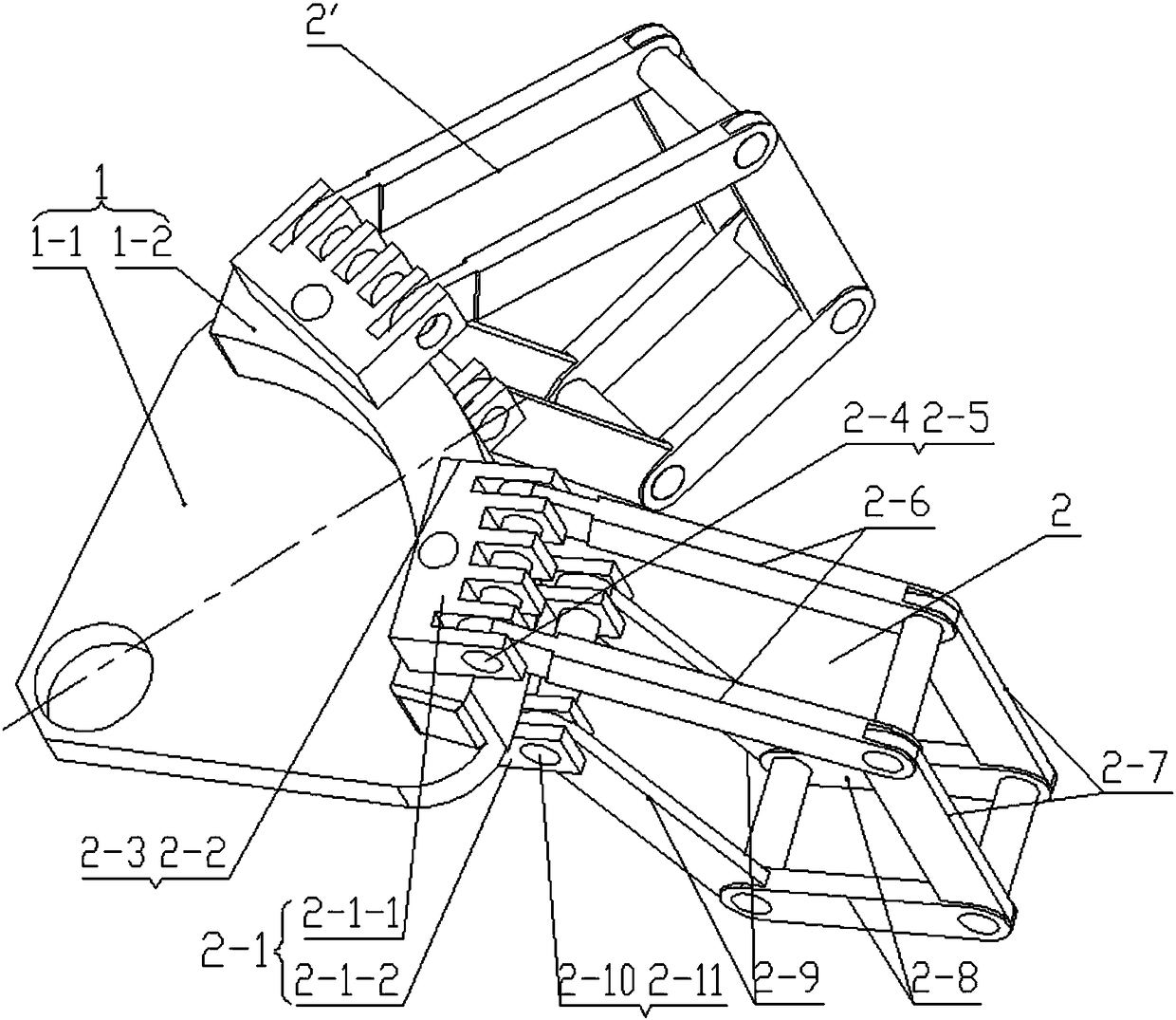
[0024] On the one hand, the present invention provides a leg configuration of a series-parallel hybrid robot, such as figure 1 As shown, it includes a base 1 and two series-parallel hybrid driving mechanisms 2, 2', wherein:
[0025] The series-parallel hybrid drive mechanisms 2 and 2' both include a first connecting rod 2-1, a second connecting rod 2-6, a third connecting rod 2-7, and a foot-end connecting rod 2-8, which are sequentially connected in series by rotating pairs. and the fourth connecting rod 2-9, the base 1 adopts the first rotating pair 2-2 arranged vertically to connect one end of the first connecting rod 2-1, and the other end of the first connecting rod 2-1 adopts the second rotating pair respectively 2-4 and the third rotating pair 2-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com