Augmented Kalman filter based satellite interference torque estimation method
A technology for interfering torque and satellites, which is applied to space navigation equipment, space navigation aircraft, and space navigation aircraft guidance devices, etc. It can solve the problem of unsatisfactory improvement in the control accuracy of feedforward information, and the bandwidth of satellite attitude controllers should not be too high. Problems such as accurate interference compensation cannot be realized, and the effects of suitable ground processing and on-orbit real-time calculation, improving attitude control accuracy and accurate compensation can be achieved.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0058] The present invention will be further elaborated below by describing a preferred specific embodiment in detail in conjunction with the accompanying drawings.
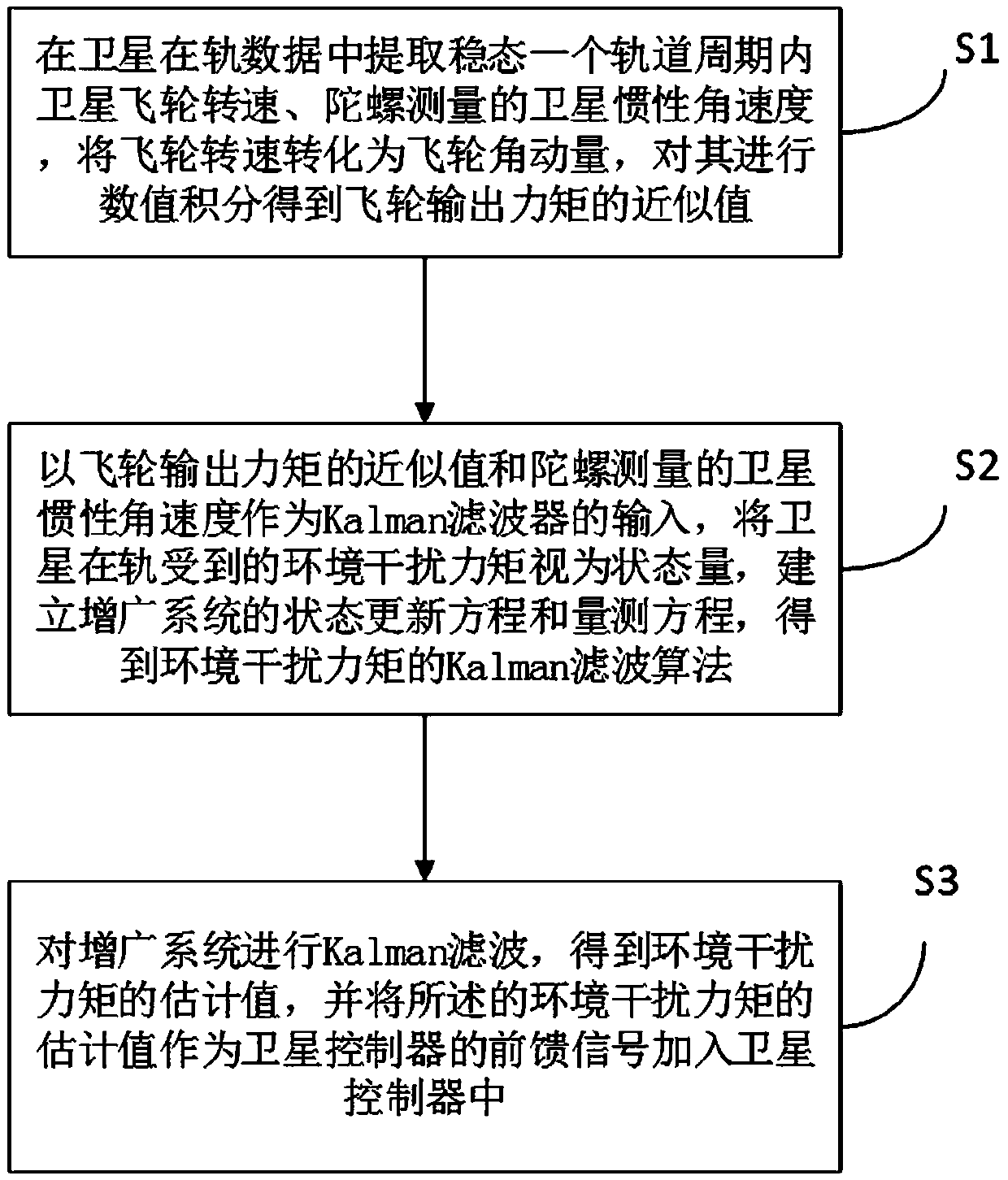
[0059] Such as figure 1 As shown, a satellite interference moment estimation method based on augmented Kalman filtering includes the following steps:
[0060] S1, extracting the satellite flywheel rotational speed and the satellite inertial angular velocity measured by the gyroscope in the satellite in-orbit data, converting the flywheel rotational speed into the flywheel angular momentum, and performing numerical difference on the flywheel angular momentum to obtain the approximate value of the flywheel output torque;
[0061] S2. Taking the approximate value of the flywheel output torque and the satellite inertial angular velocity measured by the gyro as the input of the Kalman filter, the environmental disturbance torque received by the satellite in orbit is regarded as a state quantity, and the state update e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com