Motion control method for autonomous berthing of unmanned surface vessel
A motion control, unmanned boat technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as inability to adjust online, accidents, shocks, etc., achieve good stability and real-time performance, prevent The effect of overshoot and effective control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The specific embodiment of the present invention will be further described below in conjunction with accompanying drawing:
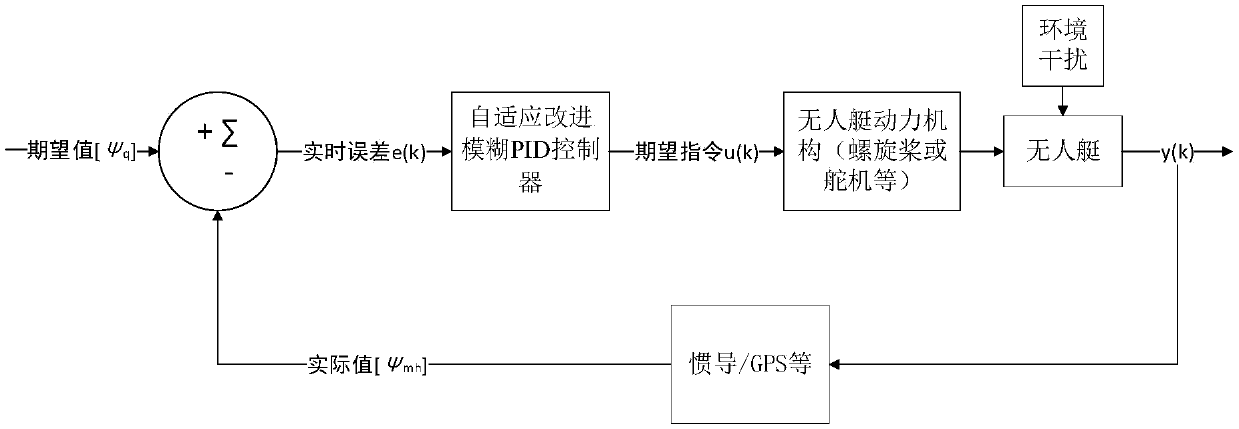
[0042] combine figure 1 , transfer the control expectation value to the UAV, that is, [Ψ q ], using inertial navigation to measure the current actual value of the unmanned boat [Ψ mh], calculate the absolute value of error e (k), as the input of the self-adaptive improved fuzzy PID controller, and solve the expected command u (k) (expected voltage or expected speed or expected thrust) by the controller. The present invention takes the expected voltage as For example, the power mechanism of the unmanned boat receives and executes the expected voltage command, thereby changing the motion state of the unmanned boat, and measures the speed or heading of the unmanned boat at the next moment through inertial navigation, makes a difference with the expected value and takes the absolute value, and uses it as Adaptively improve the input of the fuzzy PID...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com